Après l’annonce de ce nouveau projet Pi BOAt – Drone marin fin novembre, entrons aujourd’hui dans le vif du sujet 🙂
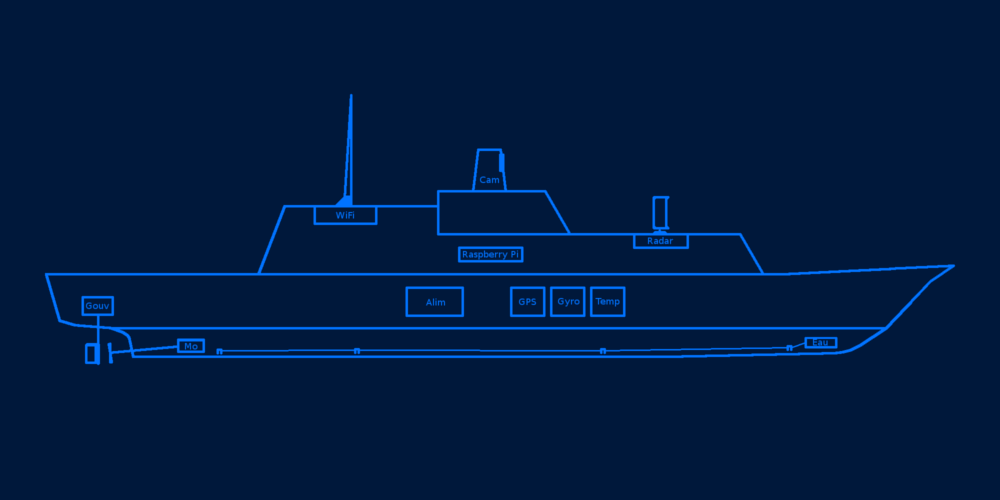
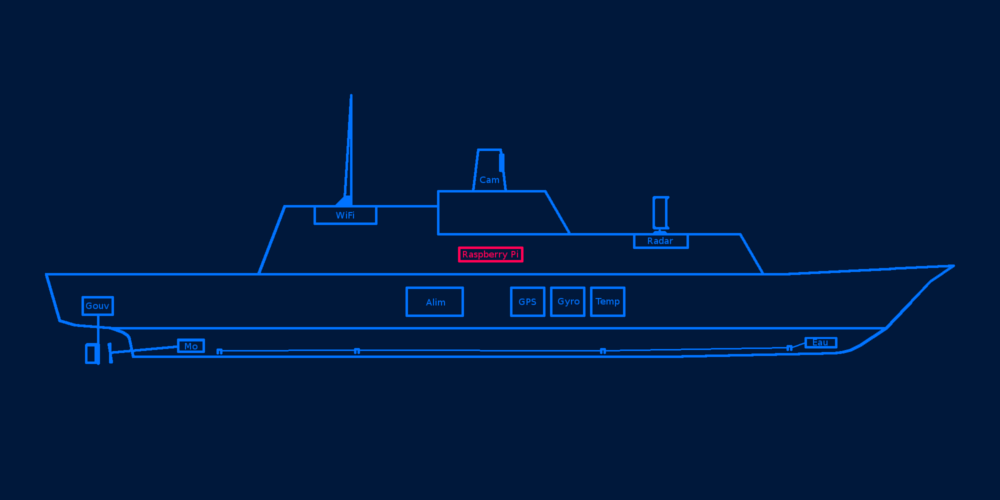
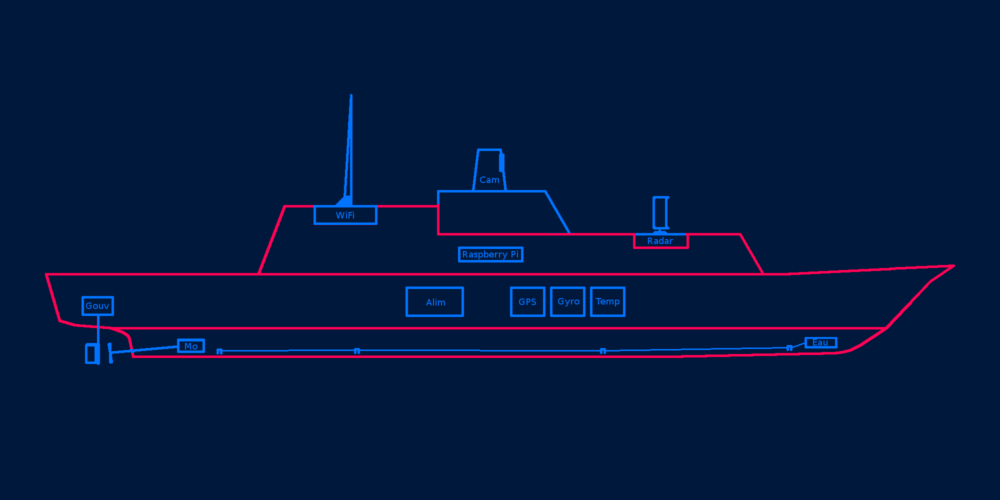
Le Pi BOAt est composé d’une multitude de modules (moteurs, gouvernails, caméra, radar…). Je ferai un article dédié pour chaque module, ce qui vous permettra d’utiliser les explications faites sur un module pour un autre projet. Je ferai également en sorte que l’ensemble reste fonctionnel même si tous les modules ne sont pas présents. De cette manière, vous pourrez reproduire le Pi BOAt chez vous, en ne sélectionnant que les modules qui vous intéressent 🙂
D’autres modules pourrons être ajoutés par la suite sans bouleverser le fonctionnement global du Pi BOAt.
Ci dessous, la liste des modules que je vais implémenter dans le Pi BOAt et qui feront chacun l’objet d’un article dédié. N’hésitez pas à soumettre vos idées et remarques 😉
Moteurs
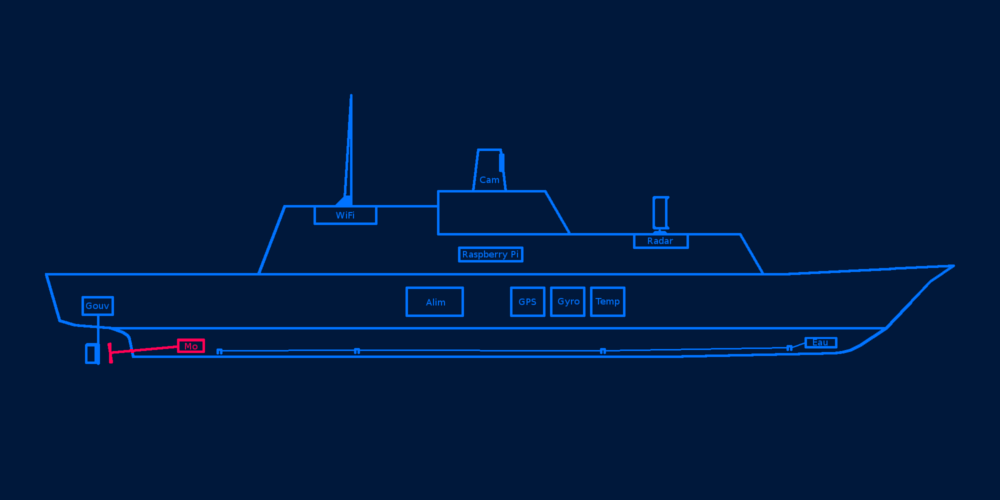

 La propulsion du Pi BOAt sera assurée par deux moteurs DC pilotés par un circuit intégré L293D (pont H). Ce circuit intégré permet de gérer le sens et la vitesse des deux moteurs.
La propulsion du Pi BOAt sera assurée par deux moteurs DC pilotés par un circuit intégré L293D (pont H). Ce circuit intégré permet de gérer le sens et la vitesse des deux moteurs.
Gouvernails
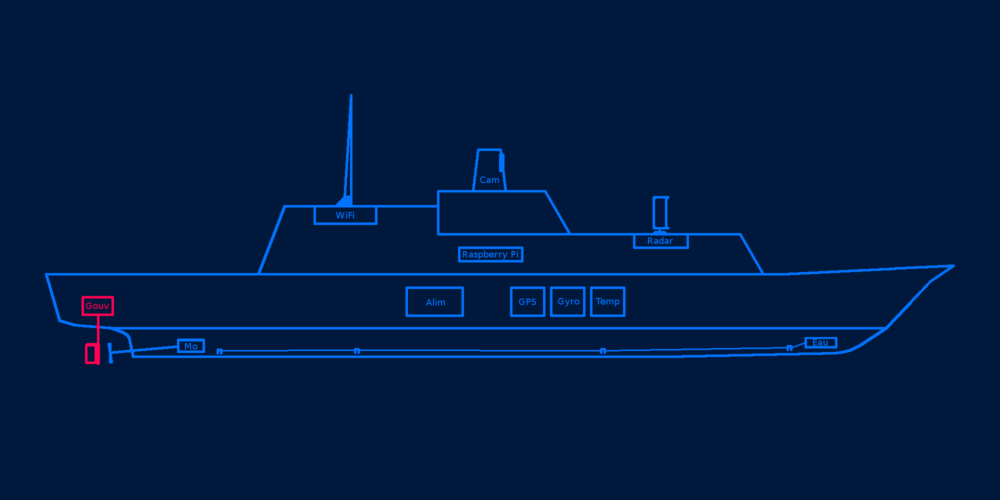

 Les gouvernails seront quand à eux animés par un servo moteur. Nous nous inspirerons du travail réalisé sur les servos moteurs détaillé dans cet article : MagdiBlog – GPIO et servos moteurs
Les gouvernails seront quand à eux animés par un servo moteur. Nous nous inspirerons du travail réalisé sur les servos moteurs détaillé dans cet article : MagdiBlog – GPIO et servos moteurs
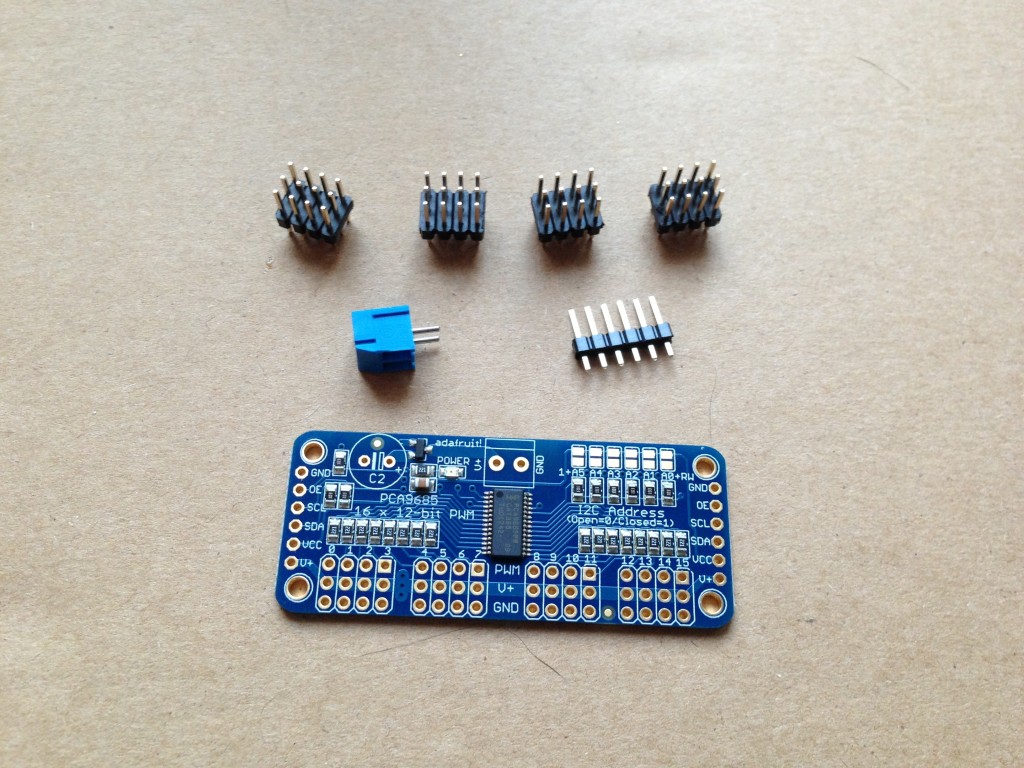
Note : Nous utiliserons deux autres servos moteurs pour le pilotage de la caméra et du radar. Pour faciliter la gestion de plusieurs servos moteurs avec le Pi, nous utiliserons la carte PCA9685 de chez Adafruit.
Caméra
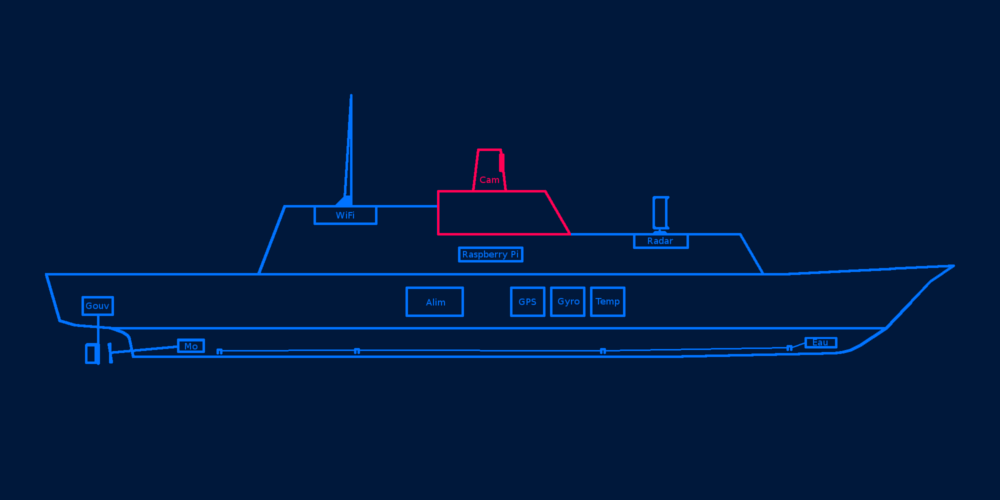
 La caméra servira à piloter le Pi BOAt avec un retour d’image en temps réel. Nous pourrions nous limiter à l’utilisation du module Pi caméra fixe, mais nous allons y ajouters deux composants, un stabilisateur mécanique (pour stabiliser l’image) et un servo moteur pour pouvoir orienter la caméra à 360°.
La caméra servira à piloter le Pi BOAt avec un retour d’image en temps réel. Nous pourrions nous limiter à l’utilisation du module Pi caméra fixe, mais nous allons y ajouters deux composants, un stabilisateur mécanique (pour stabiliser l’image) et un servo moteur pour pouvoir orienter la caméra à 360°.
Radar
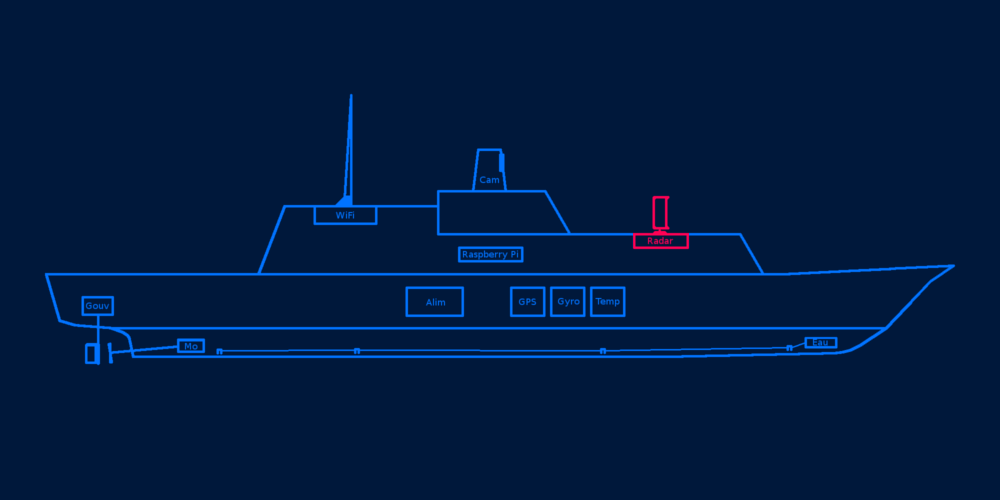
 Sans doute le module le plus fun à réaliser 🙂 Nous utiliserons le télémètre à ultra-son SRF02, monté sur un servo moteur pour avoir un balayage à 360° et ainsi obtenir une « carte » des obstacles présents autours du bateau. Rien que d’en parler, ça m’éclate 🙂
Sans doute le module le plus fun à réaliser 🙂 Nous utiliserons le télémètre à ultra-son SRF02, monté sur un servo moteur pour avoir un balayage à 360° et ainsi obtenir une « carte » des obstacles présents autours du bateau. Rien que d’en parler, ça m’éclate 🙂
Nous nous inspirerons du travail réalisé sur ce télémètre et détaillé dans cet article : MagdiBlog – GPIO Télémètre ultra-son SRF02
Lire l’article dédié à ce module : Pi BOAt – Radar de surface
Télémétrie
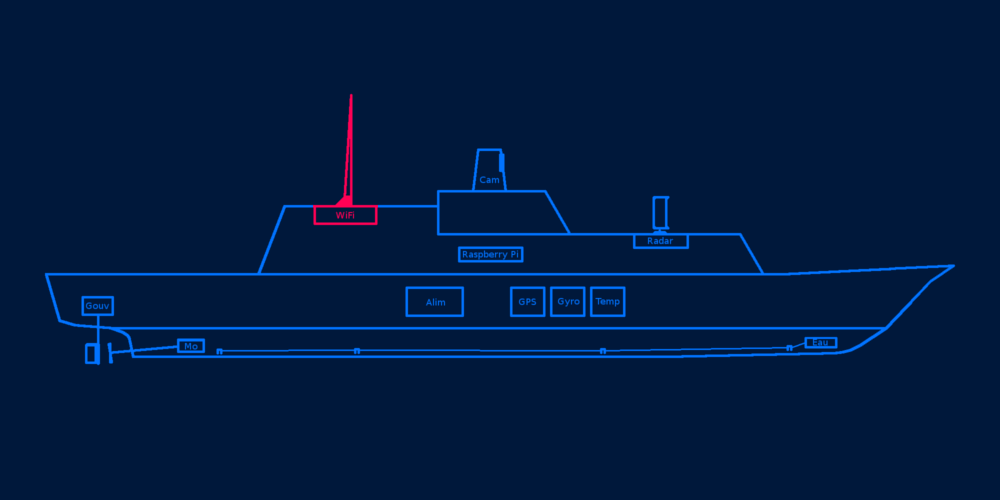
 Après moultes réflexions, j’ai décidé que le lien radio se fera par WiFi, tout simplement. Il y a de nombreux pour et contre sur ce choix et je serai ravi d’en discuter avec vous. Pour ma part, le gros avantage du WiFi, c’est qu’on peut y faire passer toutes les infos nécessaires au pilotage du bateau (images temps réels, info de guidage, position, etc…). Le second gros avantage de ce choix est que le bateau pourra être piloté par n’importe quel device équipé d’une puce WiFi (PC portable, tablette, smartphone…).
Après moultes réflexions, j’ai décidé que le lien radio se fera par WiFi, tout simplement. Il y a de nombreux pour et contre sur ce choix et je serai ravi d’en discuter avec vous. Pour ma part, le gros avantage du WiFi, c’est qu’on peut y faire passer toutes les infos nécessaires au pilotage du bateau (images temps réels, info de guidage, position, etc…). Le second gros avantage de ce choix est que le bateau pourra être piloté par n’importe quel device équipé d’une puce WiFi (PC portable, tablette, smartphone…).
Enfin, ce module pourra être facilement remplacé par un module 3G/4G si le coeur vous en dit 🙂
GPS
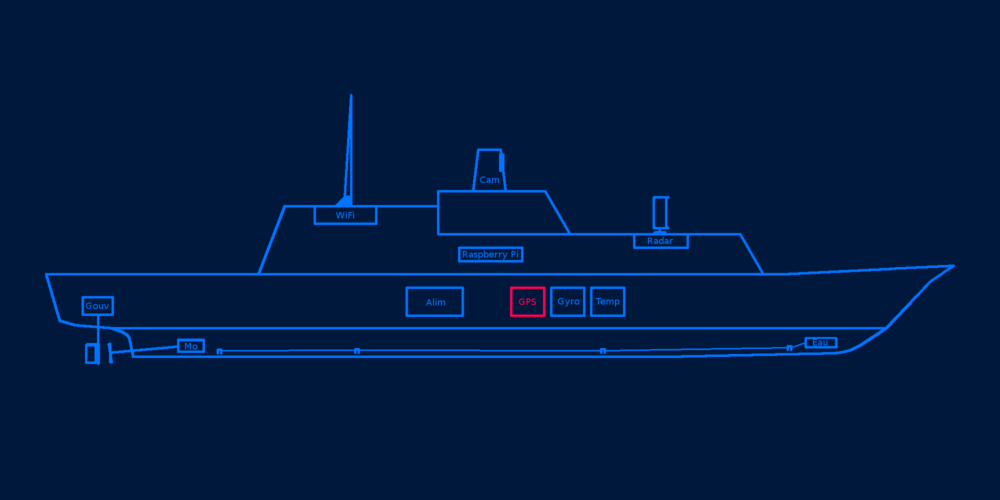
 Parce qu’il est intéressant de pouvoir suivre l’évolution du bateau sur une carte et puisqu’il sera question de développer des fonctions de retour automatique au port, nous embarquerons un module GPS à bord du Pi BOAt 🙂
Parce qu’il est intéressant de pouvoir suivre l’évolution du bateau sur une carte et puisqu’il sera question de développer des fonctions de retour automatique au port, nous embarquerons un module GPS à bord du Pi BOAt 🙂
Nous utiliserons probablement l’excellent module Adafruit Ultimate GPS Breakout.
Gyroscope, accéléromètre et boussole
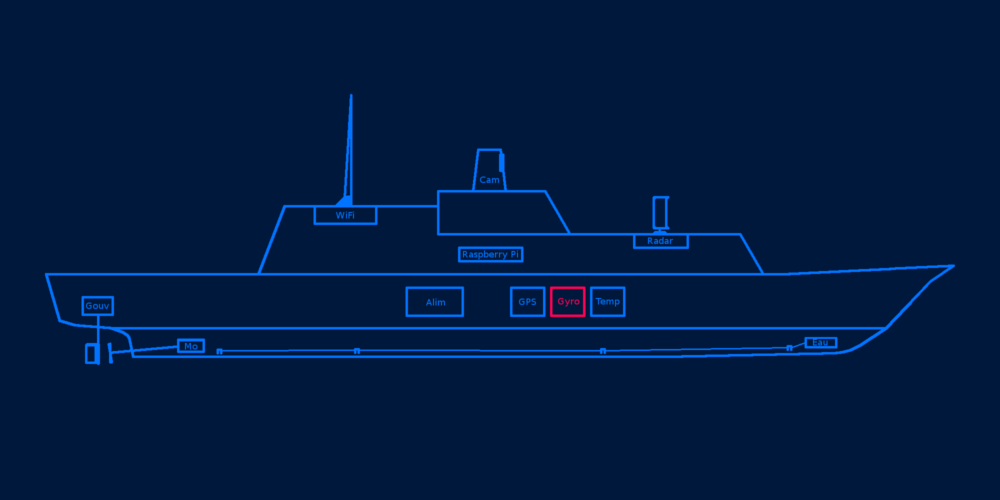
 Ce module nous permettra de voir si le bateau tangue ou chavire pour éventuellement déclencher un système de sécurité (à méditer).
Ce module nous permettra de voir si le bateau tangue ou chavire pour éventuellement déclencher un système de sécurité (à méditer).
La boussole nous permettra de connaître le cap du bateau ce qui facilitera l’implémentation de la fonction de retour automatique au port.
Nous utiliserons probablement le module Pololu MinIMU-9 qui intègre un gyroscope, un accéléromètre et une boussole.
Température
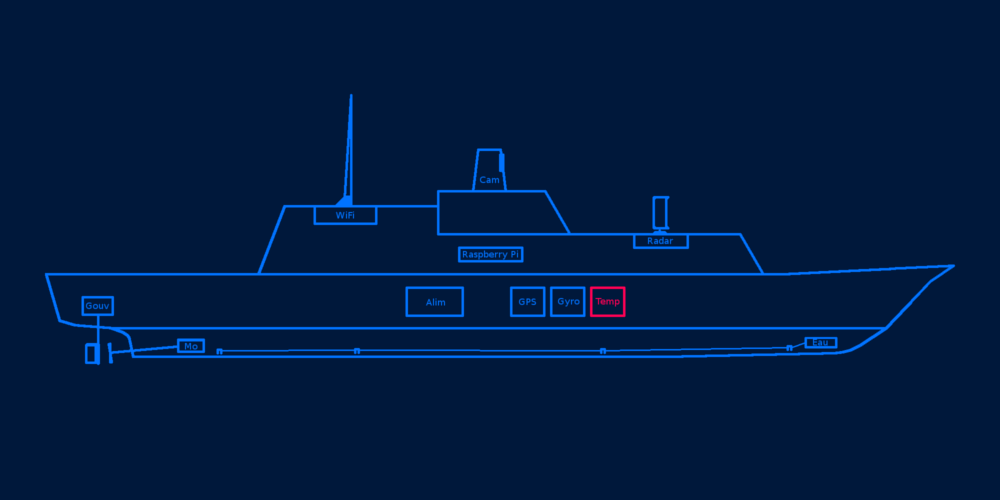
 Non indispensable au pilotage du bateau, la sonde de température pourra servir à faire des relevés de la température de l’eau par exemple.
Non indispensable au pilotage du bateau, la sonde de température pourra servir à faire des relevés de la température de l’eau par exemple.
Nous nous inspirerons du travail réalisé sur les sondes de températures et détaillé dans l’article : MagdiBlog – GPIO sondes de température
Capteur d’eau
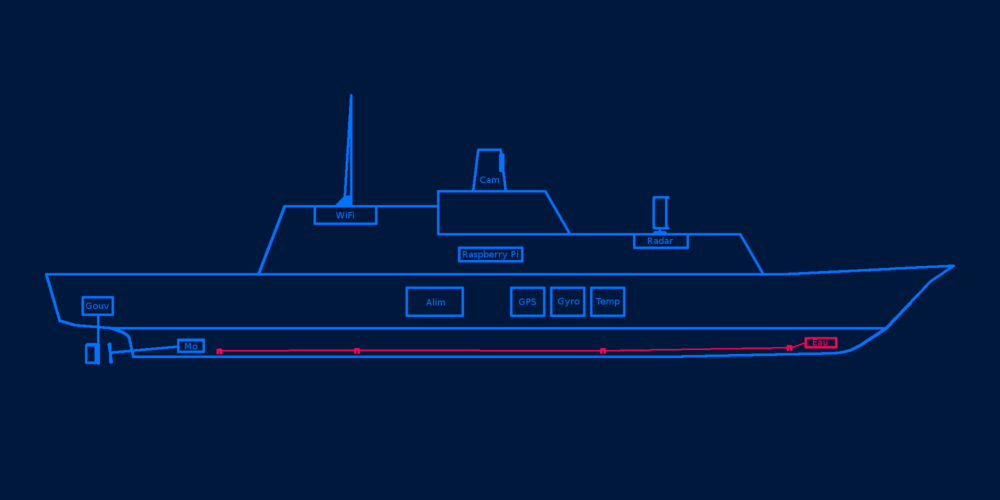
Malgré tout le soin apporté à la confection de la coque du bateau, les voies d’eau sont toujours possibles. Pour éviter les catastrophes et ramener rapidement le bateau au port en cas d’infiltration d’eau, nous allons mettre en place un système très simple de détection d’eau.
Alimentation
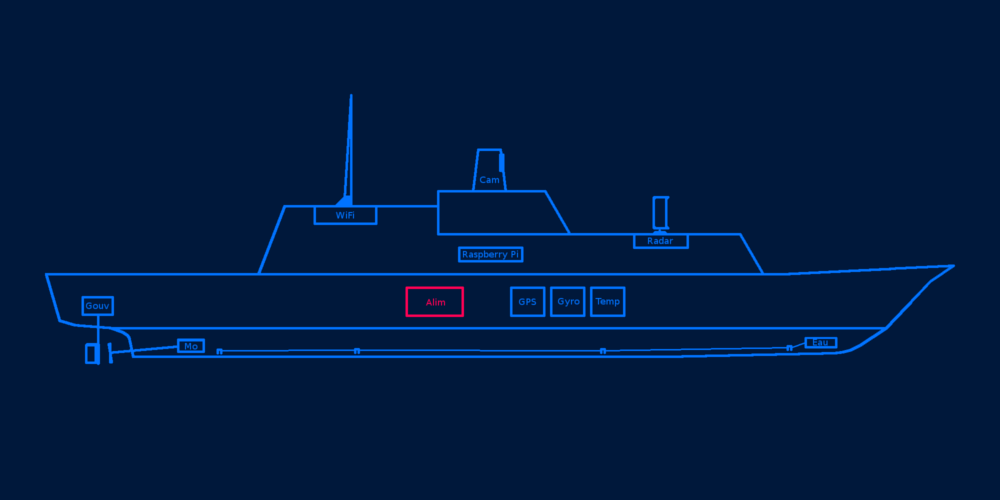
Nous allons ici gérer l’alimentation des moteurs et servos moteurs ainsi que l’alimentation du Raspberry Pi qui pilotera l’ensemble.
A l’heure actuelle, je pense faire deux circuits d’alimentation différents, un pour les moteurs et un pour le Pi. Je pense également mettre en place un système d’alimentation de secours afin d’éviter de sortir les palmes pour aller chercher le bateau au milieu d’un lac 😉
Pour les moteurs nous utiliserons probablement un petit accu plomb. Pour le Pi, nous utiliserons certainement une batterie Li-Ion 5V. A voir quelle sera la capacité d’emport du bateau en terme de poids.
Pour en savoir plus sur les batteries, rendez vous ici : MagdiBlog – Comment alimenter votre Raspberry Pi avec une batterie
Raspberry Pi
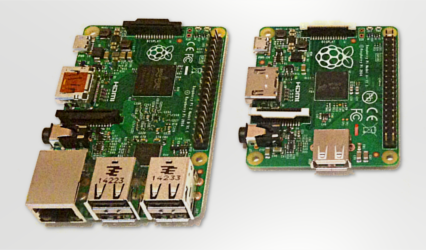 La partie la plus importante du projet, le Raspberry Pi, dont le rôle sera de faire fonctionner tous les autres modules ensembles et piloter le bateau.
La partie la plus importante du projet, le Raspberry Pi, dont le rôle sera de faire fonctionner tous les autres modules ensembles et piloter le bateau.
Je ne suis pas encore fixer sur certains aspects, j’hésite encore à utiliser un Pi 2 B (le plus performant) pour gérer tous les modules, ou utiliser plusieurs Pi Zero (un pour les moteurs et le gouvernail, un pour les systèmes radar, gps, gyro, température, détecteur d’eau et un Pi A+ pour la caméra et la télémétrie.
Je ferai un test avec un Pi 2 B pour voir si il peut gérer l’ensemble des modules sans saturer.
Coque et structure
Une fois que tous les modules seront opérationnels, j’attaquerai la construction de la coque et de la structure du bateau. Je suis totalement novice dans ce domaine et même si je me documente sur le sujet depuis plusieurs mois maintenant, je lance un appel à l’aide à tous ceux qui peuvent m’aider ou me donner des conseils 🙂
Je suis notamment à la recherche de plans de coque, pour un bateau d’environ 1m à 1m20 de long 🙂
Pour l’instant, la taille et l’allure générale du Pi BOAt ne sont pas encore définies. Cependant, j’aimerai approcher quelque chose qui ressemble au design des frégates FREMM : https://fr.wikipedia.org/wiki/Classe_Aquitaine

La suite
Dans le prochain article, je détaillerai l’architecture logicielle mise au point pour donner vie au Pi BOAt puis j’attaquerai un par un l’ensemble des modules pré-cités.
N’hésitez pas à soumettre vos idées de modules et à donner votre avis sur les modules existants, leur fonction et leur conception.
Merci à tous et à très bientôt pour la suite 😉
Salut, super article, je voulait moi aussi faire un bateau avec le Raspberry Pi et plein de gadget. Pour le plan du bateau je me posait la même question, je ne sais pas du tout comment le faire ni avec quel matériau. Par contre, moi je voulait faire plutôt un bateau type Garde cotière canadienne, vu que je suis Canadien.
Bonjour
je vis de lire l’article et mon ami et moi avons un prototype de bateau hybride a construite . plus d’info via le lien si possible
https://www.facebook.com/photo.php?fbid=770449666458581&set=pb.100004806643877.-2207520000.1539528012.&type=3&size=677%2C960
Pour la réalisation du bateau, tu trouveras ce qu’il faut sur le forum
http://www.modelisme.com/forum/bateaux-telecommandes/
N’hésite pas a créer un topic spécial pour la réalisation de ton projet 😉
Généralement Albertus répond assez vite, c’est un passionné 🙂
Projet intéressant, il y a moyen de rester un certain temps sur le calcul du cap et la réaction du gouvernail en conséquence, pas évident du tout à maitriser, voir ici pour t’en convaincre: http://forum.arduino.cc/index.php?topic=219848.0
Quelques liens intéressants au passage:
http://forum.arduino.cc/index.php?topic=236938.0
http://www.zerokol.com/2012/09/arduinofuzzy-fuzzy-library-for-arduino.html
Bonne construction 😉
Merci beaucoup pour les infos 🙂
Hé mais c’est l’enfer sur terre ce forum !!! Deux heures que j’essaie de poster un malheureux sujet…
Effectivement ce forum est tenu par une personne bénévole bien qu’il y ai beaucoup de monde dessus.
Il y a parfois des ralentissements.
C’est quoi qui te bloque? Tu n’arrives pas à créer le topic?
Je m’en sors mais je n’ai jamais vu un fofo aussi laborieux d’accès ^^
En prévision il faut écrire ton sujet dans un bloc note, et seulement après tu le copie dans le forum et tu envoies
Au départ c’est long, mais après tu te fais des raccourcis vers ce qui t’intéresse et ça roule (favoris, liens utiles etc…).
J’ai l’impression que c’est un CMS avec des modules qui viennent se greffer, donc c’est assez lourd, même pour un serveur qui serait costaud.
Oui à mon avis il y a pleins modules qui ne fonctionnent pas forcément bien ensemble. Le fait de devoir se connecter sur le site puis sur le forum (dans cet ordre sinon ça ne marche pas…), la connexion qui foire une fois sur deux, les 3 gestions de profil différent, le système d’insertion de fichier, etc… compliqué ^^
Oui, effectivement j’avais oublié tout ça 🙂
On va dire qu’une fois qu’on y est, ça rend bien service 😉
Pour les pièces jointes oui attention parfois ça fonctionne pas bien, il vaut mieux faire un lien externe sur un site d’hébergement.
Ca y est ! C’est posté 😀
bonjour
pour le contrôle du bateau j ai vu un programme sur open rov (open cockpit)
ça contrôle un rov avec camera . votre avis ????
Bonjour,
Je pense qu’on peut s’en inspirer 🙂
Quoi qu’il en soit, pour le Pi BOAt comme pour tous les autres projets de Magdiblog.fr, nous allons tout décortiquer et tout créer de toute pièce 😉