Deux ans après la présentation du projet Pi BOA Drone – Un avion drone autonome longue distance (qui reste d’actualité), force est de constater que les problématiques logistiques et législatives autour d’un tel projet ont largement freiné son avancement.
En effet, outre le fait qu’il est quasiment impossible d’obtenir une autorisation pour faire voler un engin de près de trois mètres d’envergure en toute autonomie, le matériel et les locaux nécessaires à sa construction ne sont, pour le moment, pas à ma portée.
Rassurez vous, le projet n’est pas abandonné, il me faut simplement trouver les bons partenaires et sponsors pour le mener à bien ainsi que de quoi le financer 😉
Un projet intermédiaire
Tout ceci m’amène à vous présenter un nouveau projet, ô combien plus accessible, le Pi BOAt, un drone marin !
Alors oui, hors de question ici de faire un Lille-Metz (quoi que ?!), mais comme vous allez le voir, les problématiques de navigation et de contrôle entre un avion et un bateau sont relativement similaires. Si si !
Sur un bateau comme sur un avion, il faut gérer des moteurs et des ailerons (ou gouvernails), une position, une direction, une vitesse, la télémétrie, etc… La seule différence finalement, outre les questions de flottaison/aéronautique, c’est qu’un bateau navigue dans un plan, en deux dimensions donc, alors qu’un avion évolue dans un espace en trois dimensions. Voyez, c’est tout pareil 😉
De plus, un bateau coûte beaucoup moins cher en crash-test ! Au pire, un bateau, il faudra aller le chercher à la nage, alors qu’un avion ça a tendance à se vautrer lamentablement en éparpillant des morceaux sur cinquante mètres…
Pour finir, personne n’ira m’embêter avec un bateau, la chasse aux sorcières étant focalisée sur les drones volants 😉
Présentation : Pi BOAt, un drone marin
L’objectif principal de ce projet est le même que pour le Pi BOA Drone et l’ensemble des projets présentés sur MagdiBlog : se confronter à différentes problématiques techniques afin d’étendre nos connaissances 🙂
L’objectif secondaire de ce projet est de réaliser une plateforme de drone marin qui pourra servir de base pour une multitude de projets.
Je vais découper le projet en lots techniques que je détaillerai dans des articles dédiés au fur et à mesure de mes avancées. De cette manière, nous pourrons étudier les différents sujets un par un et chaque morceau pourra servir indépendamment à d’autres projets.
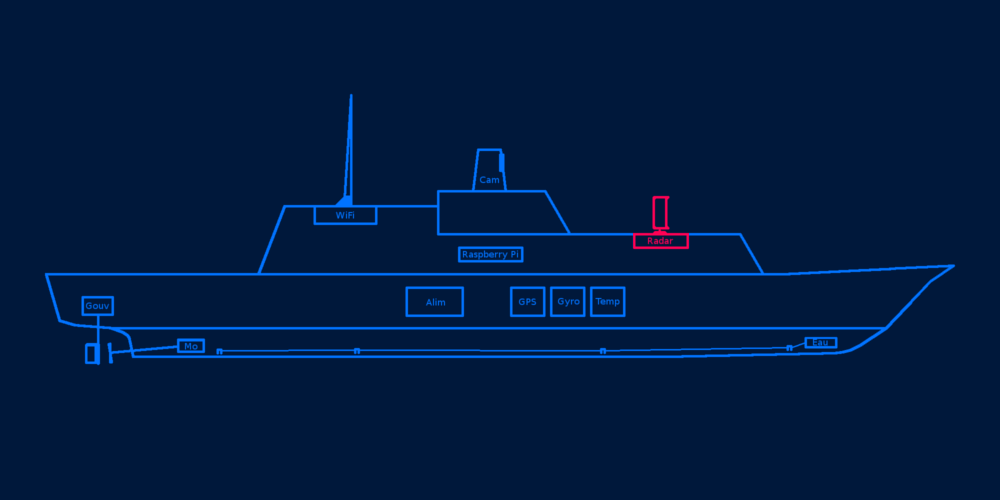
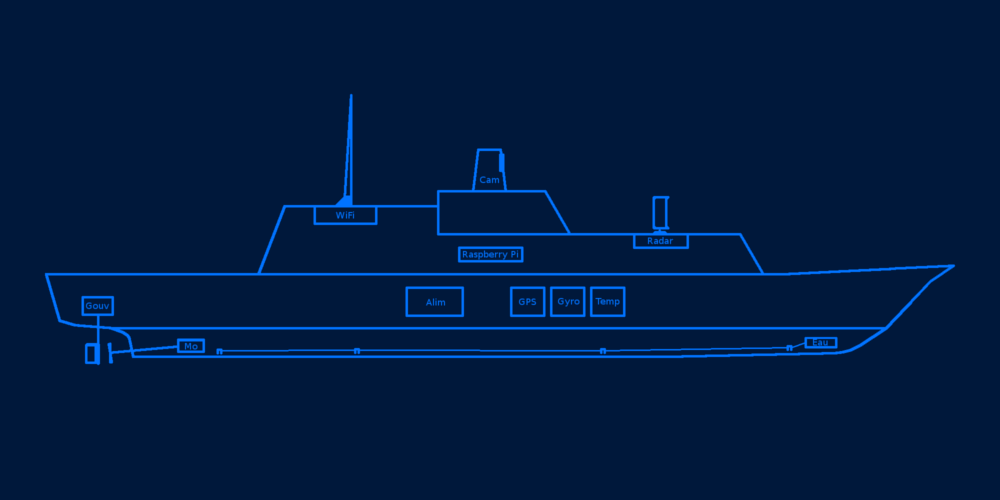
Voici les lots techniques que j’ai identifié pour le moment :
- gestion des moteurs (PWM)
- contrôle des gouvernails (servos moteurs)
- télémétrie (WiFi ou 433Mhz)
- gestion de la caméra embarquée (module pi caméra avec stabilisateur)
- position GPS
- position dans l’espace (gyroscope, accéléromètre et boussole)
- sonde radar (télémètre à ultra-son)
- sonde température
- architecture logicielle (Python)
- IHM de pilotage (web PHP)
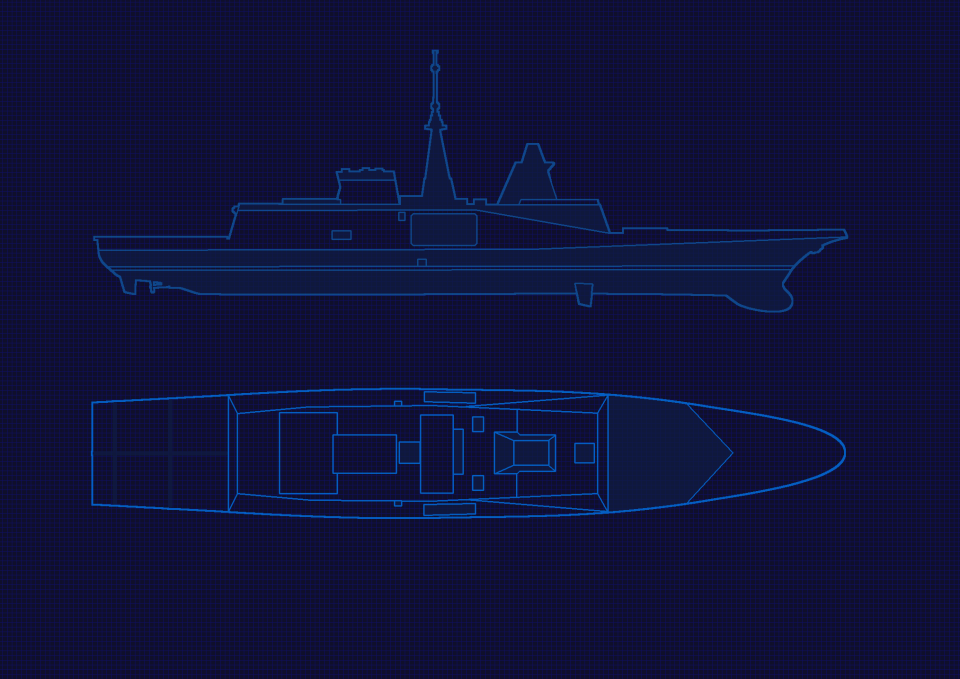
- construction du navire (en bois)
Un beau programme donc, qui fait intervenir une multitude de technologies 🙂
La construction du navire (la coque et la structure) sera la dernière étape de ce projet.
Deux valent mieux qu’un !
En m’imaginant piloter mon bateau sur un grand lac, il me vint une idée, ou plutôt une angoisse : comment récupérer mon bateau s’il ne répond plus ou qu’une panne survient au beau milieu du lac ?
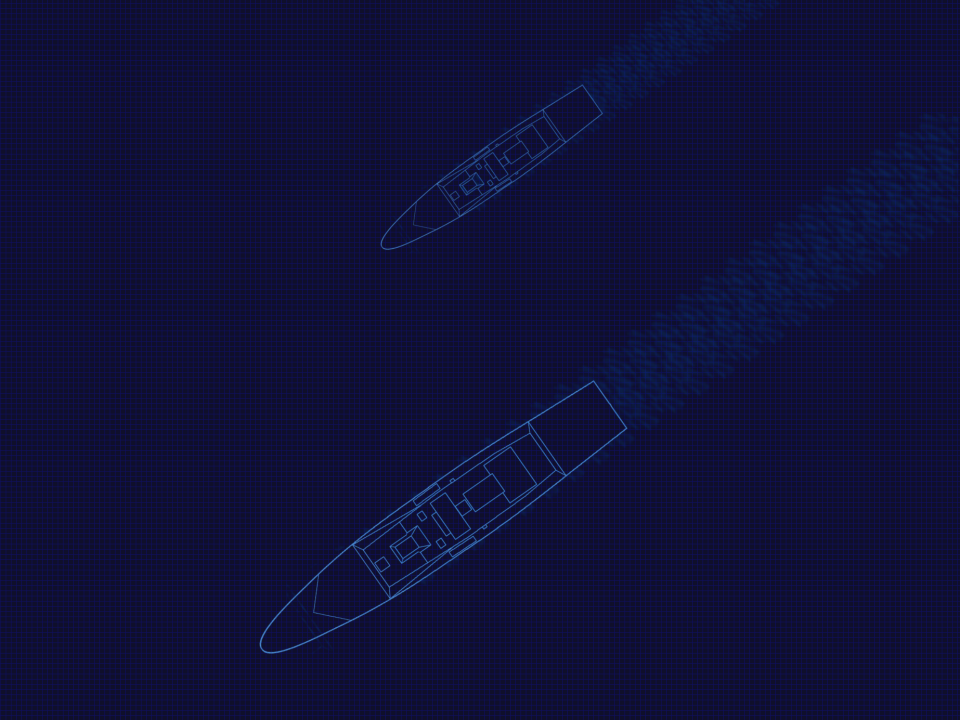 La réponse : faire un deuxième bateau, plus simple, plus petit, qui pourra accompagner le premier.
La réponse : faire un deuxième bateau, plus simple, plus petit, qui pourra accompagner le premier.
Nous fabriquerons donc deux bateaux, sur le même modèle, l’un pouvant venir au secours de l’autre en cas de problème. J’imagine déjà un petit système d’aimants à l’avant et l’arrière… que dis-je !? A la proue et à la poupe des deux bateaux 🙂
A suivre 😉