Après l’annonce de ce nouveau projet Pi BOAt – Drone marin fin novembre, entrons aujourd’hui dans le vif du sujet 🙂
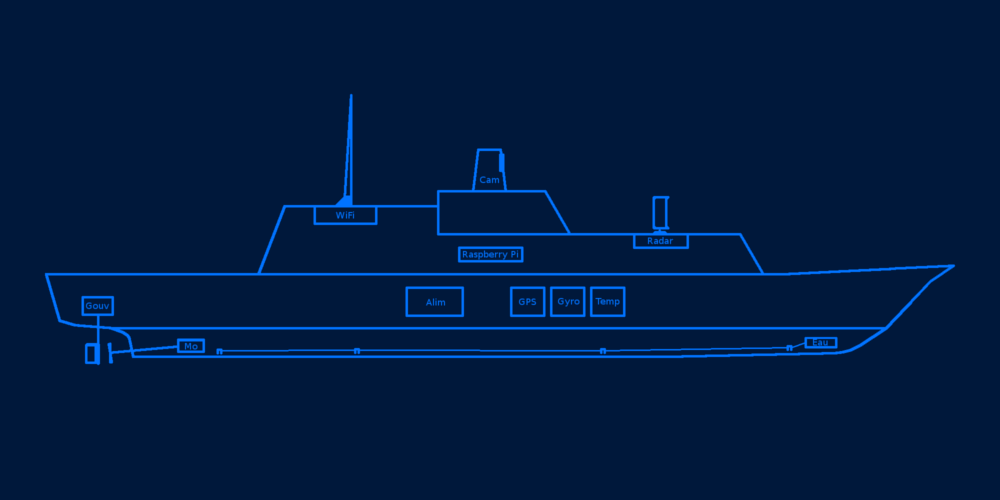
Le Pi BOAt est composé d’une multitude de modules (moteurs, gouvernails, caméra, radar…). Je ferai un article dédié pour chaque module, ce qui vous permettra d’utiliser les explications faites sur un module pour un autre projet. Je ferai également en sorte que l’ensemble reste fonctionnel même si tous les modules ne sont pas présents. De cette manière, vous pourrez reproduire le Pi BOAt chez vous, en ne sélectionnant que les modules qui vous intéressent 🙂
D’autres modules pourrons être ajoutés par la suite sans bouleverser le fonctionnement global du Pi BOAt.
Ci dessous, la liste des modules que je vais implémenter dans le Pi BOAt et qui feront chacun l’objet d’un article dédié. N’hésitez pas à soumettre vos idées et remarques 😉