 C’est avec un grand plaisir que j’attaque ce nouveau projet : un drone avion longue distance, piloté par un Raspberry Pi, baptisé Pi BOA Drone 🙂 L’objectif (impossible ? ambitieux ?) de ce projet est d’effectuer un vol de 400 kms (entre Lille et Metz) en parfaite autonomie (auto-pilote) !
C’est avec un grand plaisir que j’attaque ce nouveau projet : un drone avion longue distance, piloté par un Raspberry Pi, baptisé Pi BOA Drone 🙂 L’objectif (impossible ? ambitieux ?) de ce projet est d’effectuer un vol de 400 kms (entre Lille et Metz) en parfaite autonomie (auto-pilote) !
Les avions et la robotique m’ont toujours passionné, et le mariage de ces deux mondes avec l’avènement des drones, tant au niveau militaire que « domestique », m’a donné envie de realiser mon propre drone. Il y a quelques années, cela relevait du fantasme, les composants et matérieux étaient chers et il n’existait pas de « système » suffisamment compact et accessible pour pouvoir l’intégrer à dans « object volant » sans se ruiner. L’arrivée du Raspberry Pi a changé la donne 😉
Les drones actuels
 Un des premiers drones a avoir été présenté au grand public est l’AR Drone de Parrot. Vendu en France à partir de 2010 pour près de 350€, il est, je pense, à l’origine de nombreux autres projets volants de la famille des multicopters/multirotors.
Un des premiers drones a avoir été présenté au grand public est l’AR Drone de Parrot. Vendu en France à partir de 2010 pour près de 350€, il est, je pense, à l’origine de nombreux autres projets volants de la famille des multicopters/multirotors.
Soyons clair, il s’agit en fait d’un « hélicoptère » télécommandé amélioré. Je vais être vache, mais prenez un petit hélicoptère comme le Silverlit Sky Unicorn vendu une trentaine d’euros, ajoutez y une mini caméra, et vous obtenez le même résultat : Un objet volant télécommandé capable de faire du vol stationnaire tout en capturant une vidéo. Même si la technologie embarquée dans l’AR Drone est beaucoup plus complexe (gestion des rotors, capteurs, etc,…), le résultat est sensiblement le même… En disant cela, je ne cherche pas à dénigrer quoi que ce soit, j’essaie simplement de démystifier le sujet pour montrer qu’un drone n’est qu’un ensemble de systèmes simples 🙂
 J’ai ce petit hélicoptère (le Silverlit Sky Unicorn) depuis plusieurs mois, et je dois dire que je m’amuse beaucoup avec 😀 Il m’a énormément inspiré pour ce projet de drone. Si vous vous lancez dans l’aventure, je vous conseille de vous acheter ce genre de jouet très abordable ne serait ce que pour vous familiariser avec la chose et vous rendre compte des problématiques liées au vol d’un objet 🙂
J’ai ce petit hélicoptère (le Silverlit Sky Unicorn) depuis plusieurs mois, et je dois dire que je m’amuse beaucoup avec 😀 Il m’a énormément inspiré pour ce projet de drone. Si vous vous lancez dans l’aventure, je vous conseille de vous acheter ce genre de jouet très abordable ne serait ce que pour vous familiariser avec la chose et vous rendre compte des problématiques liées au vol d’un objet 🙂
Revenons à l’AR Drone et à son système électronique embarqué. La première génération de la bête est pilotée par un processeur ARM9 qui fait tourner un OS Linux avec 128 Mo de RAM, le tout étant télécommandé via un lien WiFi. Cela ne vous rappelle rien ? Le tableau ci-dessous vous mettra sur la voix :
| Système embarqué AR Drone v1 |
Raspberry Pi Modèle B 512 |
|
|---|---|---|
| Processeur | ARM9 468 MHz | ARM11 700 MHz |
| RAM | 128 Mo | 512 Mo |
| Connectique | USB, WiFi | USB, Ethernet, GPIO |
| OS | Linux | Linux |
Tout à fait ! C’est un système très semblable au Raspberry Pi qui fait voler l’AR Drone 🙂 Ce constat permet de valider l’hypothèse qu’il est possible de faire voler quelque chose grace à un Pi 🙂
Les drones multirotors
 Quand on dit « drone », on pense souvent aux drones de la famille des multicopters/multirotors, c’est à dire un « hélicoptère » à plusieurs rotors. En cherchant sur le web, vous trouverez une multitude de sites/blogs qui expliquent comment créer un drone multirotors. Il existe même des systèmes « prêts à l’emploi », et des circuits dédiés au pilotage des différents rotors (qui est une opération relativement complexe). De plus en plus de sites spécialisés vendent tout le matériel nécessaire pour que vous puissiez monter vous même votre drone tri/quadri/hexa/octocopter. Celon les configurations et les matériaux, comptez plusieurs centaines d’euros tout de même.
Quand on dit « drone », on pense souvent aux drones de la famille des multicopters/multirotors, c’est à dire un « hélicoptère » à plusieurs rotors. En cherchant sur le web, vous trouverez une multitude de sites/blogs qui expliquent comment créer un drone multirotors. Il existe même des systèmes « prêts à l’emploi », et des circuits dédiés au pilotage des différents rotors (qui est une opération relativement complexe). De plus en plus de sites spécialisés vendent tout le matériel nécessaire pour que vous puissiez monter vous même votre drone tri/quadri/hexa/octocopter. Celon les configurations et les matériaux, comptez plusieurs centaines d’euros tout de même.
L’intérêt de ce type de drone est qu’ils peuvent faire du vol stationnaire, ce qui est idéal pour les prises de vues aériennes. Plusieurs entreprises exploitent déjà ce créneau, comme la société Nord Drone Services dont je salue l’initiative 🙂
En revanche, ces drones consomment beaucoup d’énergie rien que pour se maintenir en l’air. Même si certains modèles permettent d’embarquer plusieurs kg de matériel, c’est au détriment de l’autonomie qui dépasse rarement les 20 minutes.
![]() J’attire votre attention sur le projet OpenPilot qui propose une plateforme opensource pour la réalisation de ce type de drone. La communauté autour de ce projet est très active et le site est une mine d’information pour quiconque s’intéresse au sujet 🙂
J’attire votre attention sur le projet OpenPilot qui propose une plateforme opensource pour la réalisation de ce type de drone. La communauté autour de ce projet est très active et le site est une mine d’information pour quiconque s’intéresse au sujet 🙂
Les drones avions
 Personnellement, je suis fasciné par les drones utilisés par les militaires depuis quelques années. Ces bijoux de technologies (qui sont en fait de gros avions télécommandés beaucoup plus simple à faire voler qu’un quadricoptère) ont le gros avantage d’avoir des ailes ! S’appuyer sur des ailes pour rester en l’air est beaucoup moins énergivore et permet d’emporter de plus lourdes charges. Il suffit d’assurer une propulsion suffisante pour assurer la portance nécessaire et ainsi maintenir l’avion en vol.
Personnellement, je suis fasciné par les drones utilisés par les militaires depuis quelques années. Ces bijoux de technologies (qui sont en fait de gros avions télécommandés beaucoup plus simple à faire voler qu’un quadricoptère) ont le gros avantage d’avoir des ailes ! S’appuyer sur des ailes pour rester en l’air est beaucoup moins énergivore et permet d’emporter de plus lourdes charges. Il suffit d’assurer une propulsion suffisante pour assurer la portance nécessaire et ainsi maintenir l’avion en vol.
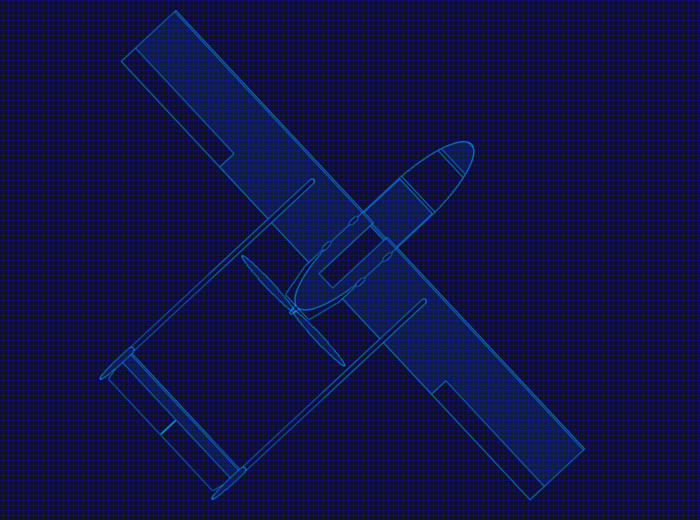
 En effet, l’objectif du projet Pi BOA Drone, est de parcourir de longues distances, l’autonomie, et par conséquent la gestion de l’energie, est donc une question cruciale. C’est pourquoi je m’oriente plutôt vers un drone avion. En terme de design, j’aime beaucoup les empennages bi-poutre comme pour le drone Harfang d’EADS.
En effet, l’objectif du projet Pi BOA Drone, est de parcourir de longues distances, l’autonomie, et par conséquent la gestion de l’energie, est donc une question cruciale. C’est pourquoi je m’oriente plutôt vers un drone avion. En terme de design, j’aime beaucoup les empennages bi-poutre comme pour le drone Harfang d’EADS.
D’où un premier croquis du drone que j’image réaliser :
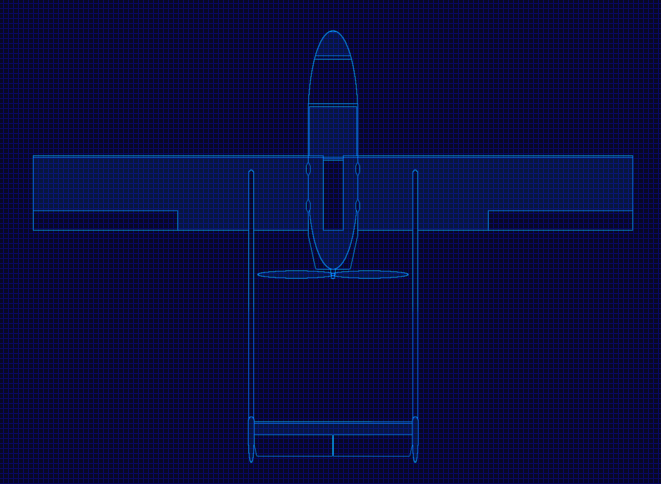
Pi BOA Drone
Qui dit drone, dit moteurs, servos moteurs, capteurs, accéléromètres, gyroscopes, gps,… c’est à dire beaucoup de composants électroniques avec lesquels il va falloir communiquer. Heureusement pour nous, le Raspberry Pi est doté d’un port GPIO (General Purpose Input/Output) 🙂
 Cet articles servant d’introduction au projet, je ne vais pas détailler ici le fonctionnement de ces pines. Sachez toutefois que le port GPIO du Pi supporte plusieurs types d’interfaces. Pour plus de détails, consulter cette page : http://elinux.org/RPi_Low-level_peripherals
Cet articles servant d’introduction au projet, je ne vais pas détailler ici le fonctionnement de ces pines. Sachez toutefois que le port GPIO du Pi supporte plusieurs types d’interfaces. Pour plus de détails, consulter cette page : http://elinux.org/RPi_Low-level_peripherals
Electronique
Contrairement aux projets Pi TimeLapse, Pi CarJukeBox et Pi HomeDashScreen, nous aurons ici besoins de compétences en électronique. Mes connaissances dans ce domaine sont, pour le moment, très limitées. Pour comprendre comment les choses fonctionnent, je me base sur des livres que j’ai acheté pour l’occasion, ainsi que sur ce que je trouve sur le web.
C’est pourquoi, je lance un appel à l’aide 🙂 Tous ceux qui sont intéressés par le projet et qui ont des compétences en électroniques sont invités à intervenir pour apporter des explications/informations/astuces ou corriger d’éventuelles erreurs 🙂
Aéronautique
Puisqu’il s’agit d’un avion, il va également falloir comprendre les notions de bases de l’aéronautique pour nous permettre de réaliser le corps et les ailes du drone ainsi que son système de propulsion.
Pire que l’électronique, mes connaissances dans ce domaine sont proches du néant 🙁 J’en appelle donc aux passionnés de modélismes et autres professionnels de l’aéronautique et vous encourage à intervenir sur les différents articles 🙂
Démarrage du projet
A l’heure d’aujourd’hui, je n’ai aucune certitude quant à la faisabilité du projet, et je n’ai qu’une vague idée de la manière dont il faut procéder 🙂 Même pour la configuration de l’avion, son design, le nombre de moteurs, ses caractéristiques et sa taille, rien n’est encore fixé, tout est à l’étude 🙂
Ce dont je suis certain, c’est que ce projet sera très instructif et passionnant 🙂
Compte tenu de la quantité de choses à comprendre pour la réalisation d’un drone de ce type piloté par un Pi, je vais aborder les différentes problématiques les unes après les autres. Tout ce qui touchera à l’utilisation du port GPIO, fera l’objet d’un article dédié publié dans la catégorie GPIO du menu principal de ce blog.
Une fois que nous aurons tous les éléments pour contrôler les différents composants, je poursuivrai cet article en expliquant de manière très didactique comment réaliser le drone et le piloter. Comme pour les autres projets, je tâcherai d’établir une liste complète du matériel à acheter ainsi qu’une estimation du prix total. Nous aborderons également les problématiques juridiques liées au pilotage d’un drone sur le territoire français.
A suivre 🙂
Note sur la réglementation relative aux UAV en France
Il est clair que les contraintes administratives et autres règlementations sont ultra restrictives quant au vol des drones et autres UAV en France. Dans tous les cas, je n’ai pas l’intention de faire quelque chose d’illégale, je ferai le nécessaire pour être en règle. S’il savère qu’il est impossible d’obtenir une autorisation pour faire voler mon drone en France, alors je me limiterai à des vols sur propriétés privées, voire dans mon salon si il le faut -_-. Il est certain que je ne vais pas m’arrêter de réfléchir à la conception d’un drone simplement parce que « c’est interdit »… D’ailleurs ce n’est pas « interdit », c’est simplement réglementé ! Il s’agit de se conformer à la réglementation 🙂
Pour le moment, je suis plus concentré sur le challenge technique, je n’en suis pas encore à faire voler quelque chose ![]()
Par ailleurs, l’idée du projet est bien de faire un drone « home made » et « from scratch ». Ce n’est pas tant de faire voler un drone qui m’intéresse (je pourrais en acheter un…), mais plutôt la partie « ingénierie ». Construire un drone autonome fait appelle à des technos et des compétences très variées, c’est cela qui m’intéresse. C’est comme pour les Légos, une fois que c’est construit, ça n’a plus vraiment d’intérêt ![]()
Pour terminer, cela me parait évident de ne pas passer au dessus des zones habitées ni au dessus des aérodromes ^^ Il y a un minimum de bon sens à avoir, et il faut prévoir un itinéraire sans danger. J’ajouterai que dans tous les cas, je ne vais pas lancer mon drone et espérer qu’il arrive à bon port… Je le suivrai de près en voiture avec tout le matériel nécessaire pour le localiser en temps réel ![]()
Maintenant que ces questions législatives et oh combien barbantes ont été abordées, je vous propose d’en revenir aux problématiques techniques ![]()