 C’est avec un grand plaisir que j’attaque ce nouveau projet : un drone avion longue distance, piloté par un Raspberry Pi, baptisé Pi BOA Drone 🙂 L’objectif (impossible ? ambitieux ?) de ce projet est d’effectuer un vol de 400 kms (entre Lille et Metz) en parfaite autonomie (auto-pilote) !
C’est avec un grand plaisir que j’attaque ce nouveau projet : un drone avion longue distance, piloté par un Raspberry Pi, baptisé Pi BOA Drone 🙂 L’objectif (impossible ? ambitieux ?) de ce projet est d’effectuer un vol de 400 kms (entre Lille et Metz) en parfaite autonomie (auto-pilote) !
Les avions et la robotique m’ont toujours passionné, et le mariage de ces deux mondes avec l’avènement des drones, tant au niveau militaire que « domestique », m’a donné envie de realiser mon propre drone. Il y a quelques années, cela relevait du fantasme, les composants et matérieux étaient chers et il n’existait pas de « système » suffisamment compact et accessible pour pouvoir l’intégrer à dans « object volant » sans se ruiner. L’arrivée du Raspberry Pi a changé la donne 😉
Les drones actuels
 Un des premiers drones a avoir été présenté au grand public est l’AR Drone de Parrot. Vendu en France à partir de 2010 pour près de 350€, il est, je pense, à l’origine de nombreux autres projets volants de la famille des multicopters/multirotors.
Un des premiers drones a avoir été présenté au grand public est l’AR Drone de Parrot. Vendu en France à partir de 2010 pour près de 350€, il est, je pense, à l’origine de nombreux autres projets volants de la famille des multicopters/multirotors.
Soyons clair, il s’agit en fait d’un « hélicoptère » télécommandé amélioré. Je vais être vache, mais prenez un petit hélicoptère comme le Silverlit Sky Unicorn vendu une trentaine d’euros, ajoutez y une mini caméra, et vous obtenez le même résultat : Un objet volant télécommandé capable de faire du vol stationnaire tout en capturant une vidéo. Même si la technologie embarquée dans l’AR Drone est beaucoup plus complexe (gestion des rotors, capteurs, etc,…), le résultat est sensiblement le même… En disant cela, je ne cherche pas à dénigrer quoi que ce soit, j’essaie simplement de démystifier le sujet pour montrer qu’un drone n’est qu’un ensemble de systèmes simples 🙂
 J’ai ce petit hélicoptère (le Silverlit Sky Unicorn) depuis plusieurs mois, et je dois dire que je m’amuse beaucoup avec 😀 Il m’a énormément inspiré pour ce projet de drone. Si vous vous lancez dans l’aventure, je vous conseille de vous acheter ce genre de jouet très abordable ne serait ce que pour vous familiariser avec la chose et vous rendre compte des problématiques liées au vol d’un objet 🙂
J’ai ce petit hélicoptère (le Silverlit Sky Unicorn) depuis plusieurs mois, et je dois dire que je m’amuse beaucoup avec 😀 Il m’a énormément inspiré pour ce projet de drone. Si vous vous lancez dans l’aventure, je vous conseille de vous acheter ce genre de jouet très abordable ne serait ce que pour vous familiariser avec la chose et vous rendre compte des problématiques liées au vol d’un objet 🙂
Revenons à l’AR Drone et à son système électronique embarqué. La première génération de la bête est pilotée par un processeur ARM9 qui fait tourner un OS Linux avec 128 Mo de RAM, le tout étant télécommandé via un lien WiFi. Cela ne vous rappelle rien ? Le tableau ci-dessous vous mettra sur la voix :
| Système embarqué AR Drone v1 |
Raspberry Pi Modèle B 512 |
|
|---|---|---|
| Processeur | ARM9 468 MHz | ARM11 700 MHz |
| RAM | 128 Mo | 512 Mo |
| Connectique | USB, WiFi | USB, Ethernet, GPIO |
| OS | Linux | Linux |
Tout à fait ! C’est un système très semblable au Raspberry Pi qui fait voler l’AR Drone 🙂 Ce constat permet de valider l’hypothèse qu’il est possible de faire voler quelque chose grace à un Pi 🙂
Les drones multirotors
 Quand on dit « drone », on pense souvent aux drones de la famille des multicopters/multirotors, c’est à dire un « hélicoptère » à plusieurs rotors. En cherchant sur le web, vous trouverez une multitude de sites/blogs qui expliquent comment créer un drone multirotors. Il existe même des systèmes « prêts à l’emploi », et des circuits dédiés au pilotage des différents rotors (qui est une opération relativement complexe). De plus en plus de sites spécialisés vendent tout le matériel nécessaire pour que vous puissiez monter vous même votre drone tri/quadri/hexa/octocopter. Celon les configurations et les matériaux, comptez plusieurs centaines d’euros tout de même.
Quand on dit « drone », on pense souvent aux drones de la famille des multicopters/multirotors, c’est à dire un « hélicoptère » à plusieurs rotors. En cherchant sur le web, vous trouverez une multitude de sites/blogs qui expliquent comment créer un drone multirotors. Il existe même des systèmes « prêts à l’emploi », et des circuits dédiés au pilotage des différents rotors (qui est une opération relativement complexe). De plus en plus de sites spécialisés vendent tout le matériel nécessaire pour que vous puissiez monter vous même votre drone tri/quadri/hexa/octocopter. Celon les configurations et les matériaux, comptez plusieurs centaines d’euros tout de même.
L’intérêt de ce type de drone est qu’ils peuvent faire du vol stationnaire, ce qui est idéal pour les prises de vues aériennes. Plusieurs entreprises exploitent déjà ce créneau, comme la société Nord Drone Services dont je salue l’initiative 🙂
En revanche, ces drones consomment beaucoup d’énergie rien que pour se maintenir en l’air. Même si certains modèles permettent d’embarquer plusieurs kg de matériel, c’est au détriment de l’autonomie qui dépasse rarement les 20 minutes.
![]() J’attire votre attention sur le projet OpenPilot qui propose une plateforme opensource pour la réalisation de ce type de drone. La communauté autour de ce projet est très active et le site est une mine d’information pour quiconque s’intéresse au sujet 🙂
J’attire votre attention sur le projet OpenPilot qui propose une plateforme opensource pour la réalisation de ce type de drone. La communauté autour de ce projet est très active et le site est une mine d’information pour quiconque s’intéresse au sujet 🙂
Les drones avions
 Personnellement, je suis fasciné par les drones utilisés par les militaires depuis quelques années. Ces bijoux de technologies (qui sont en fait de gros avions télécommandés beaucoup plus simple à faire voler qu’un quadricoptère) ont le gros avantage d’avoir des ailes ! S’appuyer sur des ailes pour rester en l’air est beaucoup moins énergivore et permet d’emporter de plus lourdes charges. Il suffit d’assurer une propulsion suffisante pour assurer la portance nécessaire et ainsi maintenir l’avion en vol.
Personnellement, je suis fasciné par les drones utilisés par les militaires depuis quelques années. Ces bijoux de technologies (qui sont en fait de gros avions télécommandés beaucoup plus simple à faire voler qu’un quadricoptère) ont le gros avantage d’avoir des ailes ! S’appuyer sur des ailes pour rester en l’air est beaucoup moins énergivore et permet d’emporter de plus lourdes charges. Il suffit d’assurer une propulsion suffisante pour assurer la portance nécessaire et ainsi maintenir l’avion en vol.
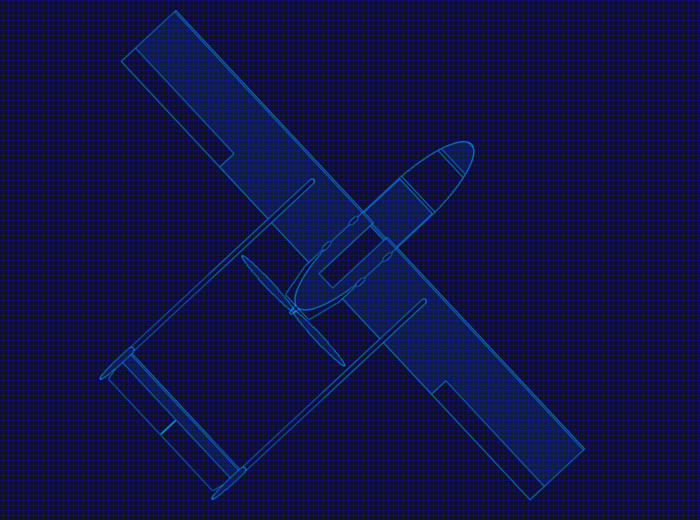
 En effet, l’objectif du projet Pi BOA Drone, est de parcourir de longues distances, l’autonomie, et par conséquent la gestion de l’energie, est donc une question cruciale. C’est pourquoi je m’oriente plutôt vers un drone avion. En terme de design, j’aime beaucoup les empennages bi-poutre comme pour le drone Harfang d’EADS.
En effet, l’objectif du projet Pi BOA Drone, est de parcourir de longues distances, l’autonomie, et par conséquent la gestion de l’energie, est donc une question cruciale. C’est pourquoi je m’oriente plutôt vers un drone avion. En terme de design, j’aime beaucoup les empennages bi-poutre comme pour le drone Harfang d’EADS.
D’où un premier croquis du drone que j’image réaliser :
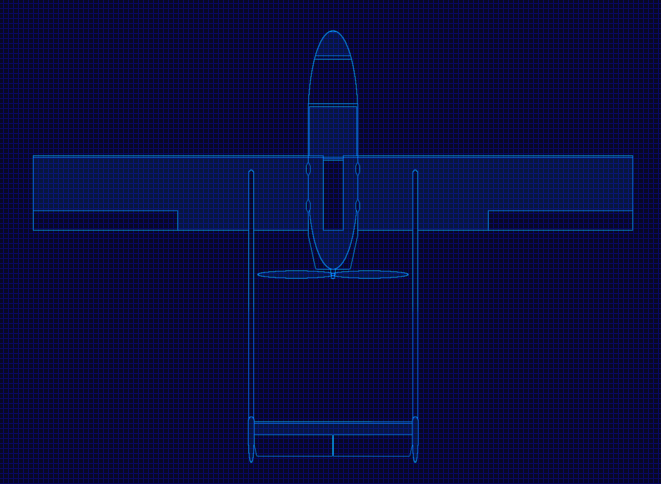
Pi BOA Drone
Qui dit drone, dit moteurs, servos moteurs, capteurs, accéléromètres, gyroscopes, gps,… c’est à dire beaucoup de composants électroniques avec lesquels il va falloir communiquer. Heureusement pour nous, le Raspberry Pi est doté d’un port GPIO (General Purpose Input/Output) 🙂
 Cet articles servant d’introduction au projet, je ne vais pas détailler ici le fonctionnement de ces pines. Sachez toutefois que le port GPIO du Pi supporte plusieurs types d’interfaces. Pour plus de détails, consulter cette page : http://elinux.org/RPi_Low-level_peripherals
Cet articles servant d’introduction au projet, je ne vais pas détailler ici le fonctionnement de ces pines. Sachez toutefois que le port GPIO du Pi supporte plusieurs types d’interfaces. Pour plus de détails, consulter cette page : http://elinux.org/RPi_Low-level_peripherals
Electronique
Contrairement aux projets Pi TimeLapse, Pi CarJukeBox et Pi HomeDashScreen, nous aurons ici besoins de compétences en électronique. Mes connaissances dans ce domaine sont, pour le moment, très limitées. Pour comprendre comment les choses fonctionnent, je me base sur des livres que j’ai acheté pour l’occasion, ainsi que sur ce que je trouve sur le web.
C’est pourquoi, je lance un appel à l’aide 🙂 Tous ceux qui sont intéressés par le projet et qui ont des compétences en électroniques sont invités à intervenir pour apporter des explications/informations/astuces ou corriger d’éventuelles erreurs 🙂
Aéronautique
Puisqu’il s’agit d’un avion, il va également falloir comprendre les notions de bases de l’aéronautique pour nous permettre de réaliser le corps et les ailes du drone ainsi que son système de propulsion.
Pire que l’électronique, mes connaissances dans ce domaine sont proches du néant 🙁 J’en appelle donc aux passionnés de modélismes et autres professionnels de l’aéronautique et vous encourage à intervenir sur les différents articles 🙂
Démarrage du projet
A l’heure d’aujourd’hui, je n’ai aucune certitude quant à la faisabilité du projet, et je n’ai qu’une vague idée de la manière dont il faut procéder 🙂 Même pour la configuration de l’avion, son design, le nombre de moteurs, ses caractéristiques et sa taille, rien n’est encore fixé, tout est à l’étude 🙂
Ce dont je suis certain, c’est que ce projet sera très instructif et passionnant 🙂
Compte tenu de la quantité de choses à comprendre pour la réalisation d’un drone de ce type piloté par un Pi, je vais aborder les différentes problématiques les unes après les autres. Tout ce qui touchera à l’utilisation du port GPIO, fera l’objet d’un article dédié publié dans la catégorie GPIO du menu principal de ce blog.
Une fois que nous aurons tous les éléments pour contrôler les différents composants, je poursuivrai cet article en expliquant de manière très didactique comment réaliser le drone et le piloter. Comme pour les autres projets, je tâcherai d’établir une liste complète du matériel à acheter ainsi qu’une estimation du prix total. Nous aborderons également les problématiques juridiques liées au pilotage d’un drone sur le territoire français.
A suivre 🙂
Note sur la réglementation relative aux UAV en France
Il est clair que les contraintes administratives et autres règlementations sont ultra restrictives quant au vol des drones et autres UAV en France. Dans tous les cas, je n’ai pas l’intention de faire quelque chose d’illégale, je ferai le nécessaire pour être en règle. S’il savère qu’il est impossible d’obtenir une autorisation pour faire voler mon drone en France, alors je me limiterai à des vols sur propriétés privées, voire dans mon salon si il le faut -_-. Il est certain que je ne vais pas m’arrêter de réfléchir à la conception d’un drone simplement parce que « c’est interdit »… D’ailleurs ce n’est pas « interdit », c’est simplement réglementé ! Il s’agit de se conformer à la réglementation 🙂
Pour le moment, je suis plus concentré sur le challenge technique, je n’en suis pas encore à faire voler quelque chose ![]()
Par ailleurs, l’idée du projet est bien de faire un drone « home made » et « from scratch ». Ce n’est pas tant de faire voler un drone qui m’intéresse (je pourrais en acheter un…), mais plutôt la partie « ingénierie ». Construire un drone autonome fait appelle à des technos et des compétences très variées, c’est cela qui m’intéresse. C’est comme pour les Légos, une fois que c’est construit, ça n’a plus vraiment d’intérêt ![]()
Pour terminer, cela me parait évident de ne pas passer au dessus des zones habitées ni au dessus des aérodromes ^^ Il y a un minimum de bon sens à avoir, et il faut prévoir un itinéraire sans danger. J’ajouterai que dans tous les cas, je ne vais pas lancer mon drone et espérer qu’il arrive à bon port… Je le suivrai de près en voiture avec tout le matériel nécessaire pour le localiser en temps réel ![]()
Maintenant que ces questions législatives et oh combien barbantes ont été abordées, je vous propose d’en revenir aux problématiques techniques ![]()
Je crois que je vais arrêter de lire tes articles … j’ai quasiment la même chose en tête … ça plus le HomeDashScreen … ça va bien, hein ?!?
Bien entendu, je rigole, par contre attention à la réglementation pour les vols de ce genre aussi bien pour le vol en lui même que les systèmes de transmission.
Pour le modèle réduit, je pense qu’il faudra que tu partes sur un modèle existant plutôt que d’en fabriquer un.
Ensuite concernant la distance, il faudra trouver le modèle qui te permette de voler tout du long (surtout concernant l’autonomie …).
Bref, un super projet que je vais suivre avec attention.
Cyril
PS: si j’ai bien suivi pour le Pi TimeLapse, là je suis en avance sur toi puisque j’ai fait construire une maison en bois 😉
Hello Cyril, lol pour les projets 🙂
Pour la réglementation, il faut effectivement faire attention, je tâcherai de me faire accompagner sur ce sujet pour être clean 🙂
Pour le modèle de l’avion, je préfère le faire entièrement moi même => si on ne se complique pas un peu la vie, c’est moins drôle 😀 Ca me permettra également de l’adapter parfaitement à mes besoins, faire plusieurs essais etc,… Et c’est surtout bcp plus économique 🙂
Au fait, ça signifie quoi BOA ?
Héhé ! C’est le nom d’une nouvelle technologie ultra secrète 😉 (en fait ce sont juste mes initiales 😉 )
Au niveau reglementation je pense que c’est mort. Elle ne doit pas autorise au civil de faire voler d’engin autonome sur de si longue distance. En modelisme la legislation indique que l’engin doit rester a vu et pouvoir reprendre la main en manuel a n’importe quelle moment. pour le vol en immersion on doit etre 2 en double commande. Le pilote en immersion et un pilote a vue qui peut reprendre la main en manuel a n’importe quelle moment …
en ce qui concerne l’avion mieux plutot partir sur un avion avec beaucoup d’allonge style motoplaneur ca plane beaucoup plus et ca reduit la charge alaire.
je peux regarde ou j’ai lu ceci sur le site de la FFAM.
Bon courage pour ce projet qui m’interesse beaucoup je vais suivre de pres.
http://aerofred.forumgratuit.org/t17-reglementation-ce-que-dit-la-ffam-du-vol-en-immersion
Ce post confirme mes souvenir de reglementation modelisme….
Vol limite a un plafond e 150m d’altitude et a vue.
Merci Wizado, cela confirme que tout est bien réglementé 🙂
Bon ok après entre nous, qui va aller vérifier et bien voir si le drone est visible, faut vraiment être tordus! 😉
En tout cas on a la même passion!
J’adore l’électronique, l’informatique et les drone militaire (surtout leurs caméra et leur zoom super puissant sa me fascine !)
Et je compte fabriquer moi aussi une réplique (du genre mq-1 Predator)
Mais en plus petit biensur !
(Je pense le faire de 1,20 mètres de long et 3,00 mètres de large )
Je te suis à 100% sur ce projet !
PS: Fait-lui des ailes super longue , sa augmente la portance et donc limite l’énergie consommée
A+
Un projet qui mérite d’être suivi de près, comme tu dis juste pour la parti technique.
Pour l’énergi de la chose je me pencherai du coté du solaire qui alimenterai une batterie av du monocritalin qui à l’aventage de charger avec la lumière du jour et du soleil. juste une idée.
A suivre.
André.
Problème, c’est que va falloir trouver un modèle qui plane vachement bien… Je ne m’y connnais pas trop en panneaux solaire, mais en plus ça va alourdir le modèle ! Un bon planneur de 1kg devrait tirer 5A/12V en constant (Brushless bien entendu). Si tu arrives à fournir ça sans avoir des tonnes de panneaux ça pourrait passer, couplé à une lipo en cas de nuages… Il faudrait aussi pouvoir le piloter en manuel afin de profiter d’éventuelles thermiques !
J’ai vu quelquepart que l’on peut espérer obtenir 150W/m² dans de bonnes conditions. Appliqué sur 0.5m² ça donne ~70W/h (faut appliquer de la marge).Sachant qu’il faudrait environ 60W c’est peut-être réalisable.
Bref, si tu as besoin d’aide dans le domaine du modélisme, dis-le moi 😉
PS : Je ne pense pas que réaliser toi-même ton planneur si tu n’y connait pas grand chose en modélisme soit une très bonne idée… :/
Merci Alexandre pour ton aide 🙂
Au contraire ! 🙂 Moins tu t’y connais dans un domaine, plus c’est une bonne idée de le faire soit même 🙂 C’est la seule manière d’apprendre de nouvelles choses, et c’est le seul et unique but de tous mes projets 🙂
Ping : 1 – Raspberry Pi BOA Drone | MagdiBlog | ...
Ping : GPIO – Servos moteurs, joypad et WiFi | MagdiBlog
Fais gaffe Olivier!!
La législation n’est peut être pas ta seule ennemie!!
http://www.konbini.com/fr/3-0/colorado-drone-deer-trail/
Bonjour, si tu veux moi je suis partant pour t’aider dans ton projet, mais comme dit en haut je partirais sur du tout fait, enfin plutôt du kit, tu aura déjà assez de boulot à tout monté et placé, le pire endroit pour le modéliste et son porte-monnaie : http://www.hobbyking.com/hobbyking/store/__437__191__Planes_Parts-FPV_Models.html
personnellement je suis sur les quadricoptères qui ne sont pas de près ni de loin des hélicoptères, j’utilise le raspberry pi aussi, arduino et m’y connais assez en électronique pour ne pas avoir à me plaindre. D’ailleurs j’ai mon site sur les multi : http://lalegiondesquadri.wordpress.com/
Merci pour ces liens 🙂
Je reste partagé sur l’utilisation d’un kit « tout fait ». En effet, l’objectif de mon projet n’est pas d’avoir un drone, mais d’en construire un 🙂
De plus, les kits qui me semblent les plus adaptés à mon projet, le Skywalker X-8 et le SkyHunter, sont très chers ! Surtout pendant les phases de tests, où les craches seront inévitables…
Hello,
Je te conseille un environnement un peu plus adapté, avec un arduino et plus précisément avec ce produit:
http://plane.ardupilot.com/
Après rien n’empêche de faire une communication entre le rasp et l’arduino pour d’autres fonctionnalités.
Sinon, tu peux installer une antenne de 2.4 GHz et 2.8 GHz de haute puissance sur le toit de ta maison pour la communication. Tu arriveras avoir une vue caméra à la maison(2.8) et une prise de contrôle de l’appareil sur une distance très grande(2.4).
Merci pour l’info st4rg33k, mais comme expliqué dans mes articles, l’objectifs est de tout faire soit même, et avec un Pi 😉
Notre projet est de fournir une option drone type « MALE »au clients travaillant en France et à l’étranger.
Nous travaillons sur des modèles « penguin » de 3 mètre d’envergure avec moteur thermique de 33cc Minimum
Contact possible pour voir si ce projet pourrait se faire en commun.
Serge
Hello,
Pour la partie électronique je peux aider sans probleme. J’ai aussi quelque connaissance en modélisme. Le pi n’aura jamais assez de GPIO pour tout gérer. Le plus simple a mon avis c’est de faire une carte d’extension. Pour ce qui concerne le drone en lui même, aller sur un type quadricopter a du sens si tu a beaucoup de poid en embarqué. Par contre Niveau autonomie faut pas espérer dépassé les 20 a 30min. Je pense qu’il vaut mieux partir sur du type motoplaneur. Tu pourra ainsi jouer avec les ascendance pour economiser les batteries.
Bon courage
Hello Wizado,
Pour le GPIO du Pi, il y a largement de quoi faire 🙂 Notament grâce au port I2C qui permet de brancher un grand nombre de contrôleur en parallèle 🙂
Pour ce qui est de la charge utile du drone, un drone avion aura plus de capacité d’emport qu’un quadricopter. Sans compter l’autonomie qui est sans commune mesure entre un quadricopter et un avion 🙂
Le motoplaneur permettrait effectivement de gagner en autonomie, mais cela pose d’autres problèmes (poids, prise au vent,…). Pour ce qui est des courants ascendants, cela risque d’être réellement très compliqué à gérer en autopilote :/
Je rappelle l’objectif : Drone avion, piloté par un Raspberry Pi, charge utile 3~4 Kg, en autopilote complet, autonomie 400 kms 🙂
Salut Olivier^^
Voila, je suis étudiant en 3D et je suis passionné d’aéronautique donc je veux bien apporter mon aide aussi petite soit-elle 🙂
Je pense pouvoir t’aider tout au moins dans une conception.
Si tu acceptes, ce sera avec plaisir !
Hello,
Avec plaisir 🙂 J’aurais surtout besoin d’aide sur l’avion en lui même, sa forme, sa taille, les ailes, etc… 🙂
Salut Olivier,
Bravo pour ton blog, c’est génial.
J’ai 2 avions et une aile volante qui dorment dans mon garage depuis des années et qui n’attendait qu’un projet comme celui-là pour revenir à la vie.
Je pense que mon « Précédent T180 » est un avion parfait pour ce genre de projet – il fait 1m80 d’envergure, il vol de manière très stable et a beaucoup de portance. Il peut emporter une petite charge – largement ce qu’il faut pour un Pi, apapreil photo, caméra, gps… Il est équipé d’un moteur thermique.
J’ai des servos une télécommande… et déjà fait des montages pour raccorder tout ça sur le Pi via un module pololu. Il faut le remettre en peu en forme mais rien de bien terrible. Je te prête tout ça bien volontier – et je me porte volontaire si tu recherches des associés pour cette aventure !
Jérémie.
Hello Jérémie, merci bcp 🙂
Est ce qu’on peut envisager de remplacer le moteur thermique par un moteur électique ?
Je dispose également de servos et de tout ce qu’il faut pour les piloter avec un Pi comme tu peux le voir dans cet article : http://www.magdiblog.fr/gpio/gpio-servos-moteurs-joypad-et-wifi/
Faut qu’on se revoit pour parler de tout ça 🙂
Je suis à 200% pour ton projet !
Si tu veux voir quelques travaux que je fais, je te les enverrai par mail. 😉
Hello 🙂
Merci pour tes encouragements !
N’hésites pas à partager tout ce que tu fais 😉
Le problème c’est que je peux pas mettre mon adresse mail ni rien ici sinon un modérateur la vire…
Un rover à base d’un Raspberry Pi 🙂
http://www.framboise314.fr/un-rover-curiosity-a-base-de-raspberry-pi/
Les Légos sont vraiment une bonne base pour créer un robot ou un rover : http://www.framboise314.fr/un-4×4-lego-pilote-par-raspberry-pi/
Salut, je vais moi aussi fabriquer un engin de la sorte, as tu avancé sur ton projet ?
Mon principal problème est la communication …. Je pensais peut etre utiliser un module 3g, car je voudrais avoir un stream video en direct !
Tiens moi au courant, je retse dans le coin !
A+
Hello,
Le projet avance lentement par manque de temps :/
Pour la communication, le mieux est en effet de passer par un module 3G mais uniquement pour la transmission d’ordre. Pour avec un stream vidéo en direct, la 3G sera trop limitée :/ A moins de sacrifier la qualité de l’image :/
Si tu penses piloter ton drone dans un rayon de 100m, tu peux utiliser du WiFi, voire un transmetteur vidéo dédié 🙂
Tiens moi au courrant de tes avancés, ça pourrait être sympa de partager nos problématiques 😉
Salut Olivier
Comment avance ton projet ?
j’avoue être assez intéressé par ce dernier et j’aimerais bien y participer.
je suis électronicien de formation et la programmation me branche bien.
alors si je peux t’être utile n’hésite surtout pas.
Hello,
Toute aide est la bienvenue 🙂 Le projet avance lentement par manque de temps :/
De plus, je me confronte de plus en plus à la législation, qui semble tuer le projet :/
En tout cas, n’hésites pas à apporter ton aide, surtout sur la partie moteur et alimentation, qui reste pour moi la partie la plus difficile à optimiser 🙂
Bonjour Olivier, est ce que cette méthode fonctionne aussi sur un drone d’une marque chinoise? J’ai un petit Parrot qui fonctionne bien mais je veux le modifier avec un cam c’est possible?
Dans l’absolue, ça pourrait fonctionner si c’est un Pi qui pilote le drone. La question est de savoir si ton drone peut soulever la charge de l’ensemble du système :/
bonjour super projet j’ai fait beaucoup de modelisme il y a longtemps et je suis aussi passionner de technologie si mes petites competences t’interessent je veus bien reflechir avec l’equipe. pour la legislation il faut avancer le projet et ensuite demander une autorisation exeptionnelle nous sommes en france il ne faut pas l’oublier.
eric
Salut, bon courage ! J’ai exactement la meme idée …
Je suis en train de mis mettre ! Sauf que je viens de decouvrir le PI …
Par contre j’ai fait 14 ans aéromodélisme …
Si le fait de réussir le projet en duo t’intéresse …
Bonne chance !
Bonjour,
Merci pour ces tutos…
J’envisage de construire un drone en fibre de carbone, j’ai une partie de la carlingue, si vous voulez que l’on partage nos avancées, n’hésitez pas à me contacter.
@plus
coucou comment avance le projet?? j’ai ete tres occuper avec ma maison et sa gestion mais me revoila y a t’il un lien pour voir la celule en carbonne de JD ce serai super de voir .
Bonjour,
J’ai également déménagé récemment, donc je n’ai malheureusement pas beaucoup avancé sur ce projet (je me suis plutôt penché sur domotiser ma nouvelle maison :D) 😛
Le projet de Drone n’est pas abandonné ! Prochain article en préparation : centrale inertielle avec test embarqué sur un avion RC 😀
Bonjour,
L’idée de ramener notre cher Pi dans un projet d’aéromodelisme est passionnante. Cependant, outre de travailler hors-la-loi, le problème majeur sera l’autonomie de l’engin.
Je me souviens d’un record établit en 2012 avec un moto planneur, seul engin capable de profiter au max des ascendences.
http://www.rcgroups.com/forums/showthread.php?t=1661795
Bonjour,
Effectivement l’autonomie est un problème majeure, surtout si on veut rester dans un contexte économiquement raisonnable :/
En revanche, le problème du moto-planeur est qu’il est extrêmement difficile d’automatiser l’utilisation des ascendances : si on veut fait un avion totalement autonome, comment faire pour qu’il exploite lui même ces ascendances pour gagner en autonomie ?
En FPV (Fisrt Person View pour les nouveaux) il existe des variometres altimétriques qui renseignent sur le taux de chute ou de montée de l’appareil.
En réflechissant tout haut, une cam InfraRouge ne pourrait-elle pas ‘voir’ les points chauds du sol et les ascendences ?
Si je ne me trompe pas, les ascendences se trouvent aussi sous les nuages denses. Il y a surement un capteur (p-e ultrasons) qui pourraient les détecter. Je suis bien conscient du fantasme et/ou de la complexité de ces idées….
Une recherche google ‘FPV long distance range’ donne déja une bonne idée des possibilités avec un équipement plus courant mais on est très en dessous d’un Lille-Metz
Le FPV n’a vraiment d’intérêt que si tu pilote l’avion. Si l’avion se pilote lui même il suffit de récupérer certaine données de vol.
Sinon pour faire du FPV sur des distances pareil, AMHA il fait passer par un satellite, et là, on change complètement d’univers ^^
Voila un vol Ultra Long Distance (301km) qui donne quelques infos sur une configuration performante : http://diydrones.com/profiles/blogs/anatomy-of-a-301-km-flight
Pour ce qui est de la règlementation française, il faut p-e aller voler au dessus d’un beau désert marocain par ex (et puis ça fera de plus belles images).
3 mètres d’envergure l’engin ^^ Avec une batterie de 23 Ah.
Cela veut dire que c’est techniquement et économiquement possible de faire un Lille-Metz 🙂
Salut, j’ai trouvé ton idée géniale, mais tu l’as abandonnée ou ..? :/
Hello
Le projet n’est pas abandonné du tout 🙂
Mais il y a plusieurs problèmes : temps, argent, réglementations, aéronautique 🙂
Mais le projet est toujours d’actualité 🙂
Et du coup il a avancé depuis ? 🙂 Bon courage 🙂
Pas énormément malheureusement :/
cool ton Project..
tu de bonne idée pour moi aussi c’est une grande passion.
je te donnerai des idées tkt.
Et dis moi tn site tourne sur un Pi? 🙂
Hello,
Nope le site est hébergé sur un serveur dédié de chez OVH. Mais je vais bientôt le migrer car les temps de réponse sont trop grand…
Salut !
L’utilisation d’une PI est pas forcément le meilleur choix, il existe déjà des cartes de vol prévus pour ce que tu souhaites faire, et vu le travail que cela demande de proposer une carte de vol et un logiciel stable à mon avis tu vas dépenser ton énergie inutilement à réinventer la roue alors que ton projet à plein d’autres points intéressants à développer.
Mais pour être franc ton projet de vol longue distance n’est surement pas réalisable sans plusieurs années d’expériences en modélisme.
Encore un qui n’a pas compris l’objectif du projet… Merci quand même d’être passé 😉
Si quelqu’un veut bien lui expliquer… 😉
Bonjour !!
Je suis actuellement en première année de DUT Génie Industrielle et Maintenance.
J’ai un projet(compliqué) mais intéressant, il est de créer un Drone à l’aide de Raspberry PI
Je m’y connais absolument pas mais l’idée me plaît énormément et j’y mettrais le temps nécessaire pour réussir.
As tu des conseils ou site web pour me guider et me conseiller à la réalisation de l’engin.
Merci d’avance 🙂
(intitulé exact du projet: « réflexion sur la faisabilité de la fabrication d’un drone à l’aide d’un Raspberry PI » )
Bonjour !!
Je suis actuellement en première année de DUT Génie Industrielle et Maintenance.
J’ai un projet(compliqué) mais intéressant, il est de créer un Drone à l’aide de Raspberry PI
Je m’y connais absolument pas mais l’idée me plaît énormément et j’y mettrais le temps nécessaire pour réussir.
As tu des conseils ou site web pour me guider et me conseiller à la réalisation de l’engin.
Merci d’avance 🙂
(intitulé exact du projet: « réflexion sur la faisabilité de la fabrication d’un drone à l’aide d’un Raspberry PI » )
Ping : Pi BOAt - Drone marin - MagdiBlog
Il en est ou ce projet?
Bonjour…
Bonjour,
Voila un projet passionnant.
Je vois 2 vrais challenges :
– Faire voler un appareil en complète autonomie (chargement d’un plan de vol, auto correction de trajectoire etc …). La solution est en effet dans le Raspberry et les composants qui lui sont raccordés.
– Faire voler un drone avion pendant une telle durée (pb de poids, d’autonomie…).
Techniquement, le plus dur me semble dans ce défi !
Les questions de réglementation viendront après, quand l’engin sera autonome en boucle au dessus d’un champ pendant quelques heures non-stop (et avec un bon projet, des autorisations d’essai existent !)
Si ça marche, il faut ouvrir une entreprise et te voila riche !
Je cogite dessus…
Re bonjour
je complète mon post par ce lien :
http://www.emlid.com/
C’est un calculateur de vol basé sur un Pi2
bonjour olivier!! et le projet ? peux tu me faire part du niveau ou tu es? .merci
Salut,
Ce projet est actuellement en stand-by pour des contraintes juridiques et de moyens.
En attendant, c’est le drone marin Pi BOAt qui est d’actualité 🙂
Bonjour projet tjr en court ?
Bonjour,
Yes, toujours en cours même pas bcp de temps en ce moment pour avancer.
Bonsoir je suis pilote sur avions rc, jets ou vgm ( voltiges grands modèle) je connais bien mon sujet et débute sur arduino. La législation se contourne légalement et je pense pouvoir t aider pour l avion avec un budget très raisonable.
Ping : Raspberry Pi | Pearltrees
Bonjour,
Jai le moyen de te faire réaliser ton projet LÉGALEMENT. Il suffit de ne pas utiliser un engin inhabité, mais plutôt un Vrai avion, avec un pilote prêt à reprendre les commandes. Bien sur impossible avec un avion certifié mais tout à fait crédible avec un Ulm. Une autonomie de 400 km est facile, les machines existantes sont légion et pas si chères que ça …
En fait l’idée d’un pilote automatique « complet » me chatouille aussi un peu. J’ai un Ulm simple et qui se pilote du bout des doigts. Je me dis que lui faire faire en automatique toute la procédure de vol (du décollage à l’atterrissage ) serait sans doute facile… et un sacré pied de nez aux « vrais » avions.
A ta dispo pour plus d’idées
Amicalement Yves
Ces données sont très utiles pour la phase suivante du projet. Merci.