Parmi les capteurs les plus usités on trouve les télémètres : des senseurs capables de mesurer les distances. Plusieurs technologies peuvent être mises en oeuvre pour mesurer les distances par télémétrie. On trouve ainsi des télémètres optiques (utilisant la lumière, comme les télémètres laser, très précis), des radars (utilisant les ondes radio), des sonar (utilisant les ondes sonores), etc…
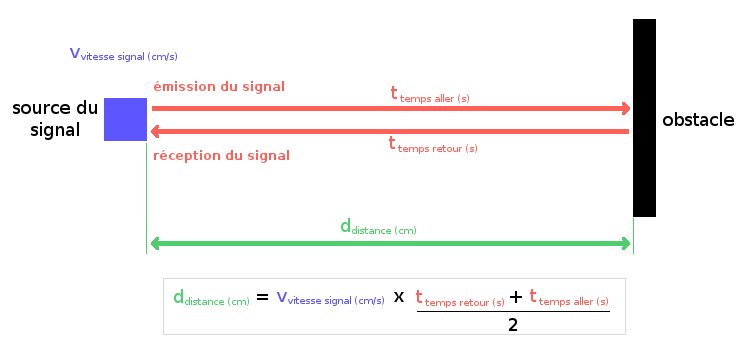
Le principe est toujours le même : Il s’agit d’envoyer un signal (lumineux, radio ou sonore) et de mesurer en combien de temps ce signal revient à son point d’origine après avoir « rebondit » sur un obstacle. Lorsqu’on connait la vitesse de propagation de la lumière ou des ondes sonores, on peut déterminer à quelle distance se trouve un objet grâce à la formule connue de tous : vitesse = distance / temps, soit distance = vitesse x temps.
Dans cette article nous allons nous intéresser en particulier aux télémètres à ultrason. Nous allons voir quels modèles choisir et comment les utiliser avec nos Raspberry PI 🙂
Continuer la lecture →