MàJ déc 2016 : changement de nom de domaine pour le projet qui devient www.cam-aero.eu
Il fait beau et chaud, les vacances d’été ne sont plus très loin. Le temps parfait pour les activités de plein air. Ca tombe bien, aujourd’hui je vais vous présenter un projet réalisé pour le site www.cam-aero.eu, en partenariat avec MagdiBlog.fr, qui ravira les amateurs d’aéronautique de loisir 🙂
L’objectif de ce projet est de doter tous les aérodromes d’un module caméra qui prend des photos de la piste et de la météo ambiante à intervalles réguliers tout en incrustant la date, l’heure et les informations météorologiques locales (telles que METAR, TAF, SIGMET) dans l’image.
Voici un aperçu d’une image d’un aérodrome dans la région de Brest :

L’ensemble des images de tous les aérodromes équipés sont collectées et stockées sur un serveur central. Toutes les images et informations météorologiques locales sont ensuite consultables par tous les membres ; ce qui leur permet de mieux préparer leurs vols, par exemple, en connaissant l’état de l’aérodrome de destination.
Un système collaboratif simple, économique, à la porté de tous (Le module s’installe sur une fenêtre avec une ventouse et nécessite une simple connexion Internet. L’installation du logiciel et sa configuration se font en une seule ligne de commande), qui permettra à tous les aérodromes de partager une vue de leur piste et leurs informations METAR facilement 🙂
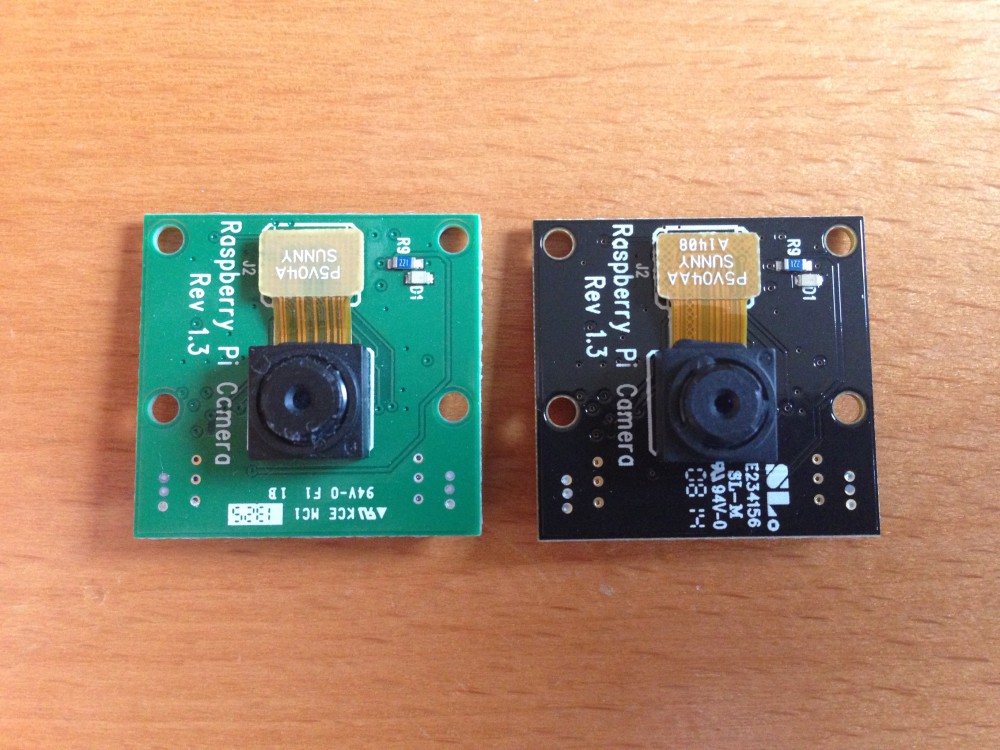
Le système complet est réalisé avec des Raspberry Pi, sans composants particuliers :
- Raspberry Pi (2, B, B+ ou A+)

- RaspiCam 5MP (ou version NoIR)
- Boitier avec emplacement pour le module caméra
- Carte SD
- Alimentation
- Dongle WiFi USB
N’hésitez pas à partager l’info et à promouvoir ce projet autour de vous 🙂
Je vous laisse découvrir le projet sur le site officiel : www.cam-aero.eu
 La réponse : faire un deuxième bateau, plus simple, plus petit, qui pourra accompagner le premier.
La réponse : faire un deuxième bateau, plus simple, plus petit, qui pourra accompagner le premier.