En parcourant le web au sujet du Raspberry Pi et en observant les statistiques de fréquentation de ce blog www.magdiblog.fr, je me rends compte que le sujet le plus recherché porte sur le fonctionnement du Pi sur batterie.
 En effet, et c’est également mon avis, ces mini-ordinateurs ne sont pas faits pour rester sur un bureau. La question de l’alimention du Pi pour qu’il puisse fonctionner en parfaite autonomie revient donc souvent.
En effet, et c’est également mon avis, ces mini-ordinateurs ne sont pas faits pour rester sur un bureau. La question de l’alimention du Pi pour qu’il puisse fonctionner en parfaite autonomie revient donc souvent.
Je vous propose ici de faire un tour d’horizon des informations et tests que j’ai pu rassembler et effectuer au cours de mes diverses expérimentations, dans le but, je l’espère, de vous permettre de mener à bien vos projets 🙂
Les besoins du Raspberry Pi
Comme précisé par la FAQ du site raspberrypi.org, le Pi a besoin d’une alimentation en courant continue de 5V la plus propre possible. En effet, le Pi n’est pas protégé contre les piques et les chutes de tension qui pourraient lui causer des dommages, c’est pourquoi il faut veiller à la qualité de l’alimentation que vous utilisez.
En pratique, votre Pi « fonctionnera » avec une alimentation comprise entre 4,5V et 5,7V. J’ai notamment pu constater que la plupart des transfos ou « chargeurs » vendus dans le commerce affichant une tension de sortie de 5V, fournissent souvent un peu plus, environ 5,5V. Rien de très grave pour votre Pi 🙂
La tenstion du courant d’alimentation est une chose, mais le plus important est l’intensité (en ampère) du courant nécessaire au fonctionnement du Pi.
 Pour le modèle B, le site raspberrypi.org préconise une alimentation d’au moins 700mA (contre 300~400mA pour le modèle A). Pour les débutants, il faut voir cela comme la « quantité » de courant que doit fournir l’alimentation pour répondre aux besoins du Pi. Ce qui veut dire qu’il vous faudra une alimentation capable de fournir au moins 700mA pour que votre Pi (modèle B) puisse fonctionner correctement. Une alimentation de 900mA conviendra tout à fait, et disposera de 200mA de marge à distribuer à d’éventuels périphériques USB par exemple.
Pour le modèle B, le site raspberrypi.org préconise une alimentation d’au moins 700mA (contre 300~400mA pour le modèle A). Pour les débutants, il faut voir cela comme la « quantité » de courant que doit fournir l’alimentation pour répondre aux besoins du Pi. Ce qui veut dire qu’il vous faudra une alimentation capable de fournir au moins 700mA pour que votre Pi (modèle B) puisse fonctionner correctement. Une alimentation de 900mA conviendra tout à fait, et disposera de 200mA de marge à distribuer à d’éventuels périphériques USB par exemple.


A savoir que ce « besoin » en courant de 700mA varie en fonction de l’utilisation du Pi, et des périphériques qui y sont connectés. Par exemple, sous Raspbian, quand le Pi modèle B ne fait rien (en idle donc), sa consommation est de l’ordre de 400~450 mA. Si on demande au processeur de travailler, il va consommer plus, avec des piques jusqu’à 600~650mA. Si on ajoute une webcam USB par exemple, on peut facilemement dépasser les 900mA. C’est d’ailleurs pour cette raison qu’il est souvent conseillé d’utiliser un hub USB disposant de sa propre alimentation afin de fournir suffisamment de courant à l’ensemble des périphériques connectés.
 Dans la pratique, j’ai constaté qu’une alimentation délivrant 1A (soit 1000mA) permet de couvrir tous les besoins, y compris avec deux périphériques USB énergivores tels qu’une webcam et une clé 3G par exemple.
Dans la pratique, j’ai constaté qu’une alimentation délivrant 1A (soit 1000mA) permet de couvrir tous les besoins, y compris avec deux périphériques USB énergivores tels qu’une webcam et une clé 3G par exemple.
Note : Certains chargeurs USB n’affichent pas directement l’intensité du courant qu’ils peuvent fournir. A la place, ils affichent la puissance max, en Watt qu’ils peuvent délivrer. La puissance (en W) est le produit de la tension (en V) et de l’intensité (en A) : P = U x I. Un transformateur 5V affichant une puissance de 12W, pourra donc fournir un courrant de 12/5 = 2,4 A.
Deux façons de brancher l’alimentation sur votre Pi
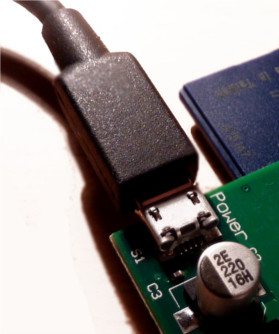
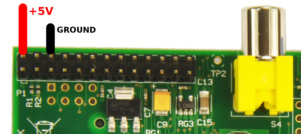
Vous pouvez, en effet, brancher l’alimentation de votre Pi de deux manières. Soit en utilisant la prise micro-USB spécialement prévue à cet effet, soit directement sur le port GPIO en branchant le + sur la pin 2 et le – sur la pin 6.
L’alimentation sur batterie
Comme nous l’avons vu précédemment, il faut utiliser une batterie qui fournisse une tension de 5V, et qui soit capable de délivrer au moins 700mA.
Plusieurs possibilités s’offrent à nous. Ci-dessous en détails, les principales alternatives des bonnes vieilles piles AA aux batteries au plomb en passant par les batteries au Lithium.
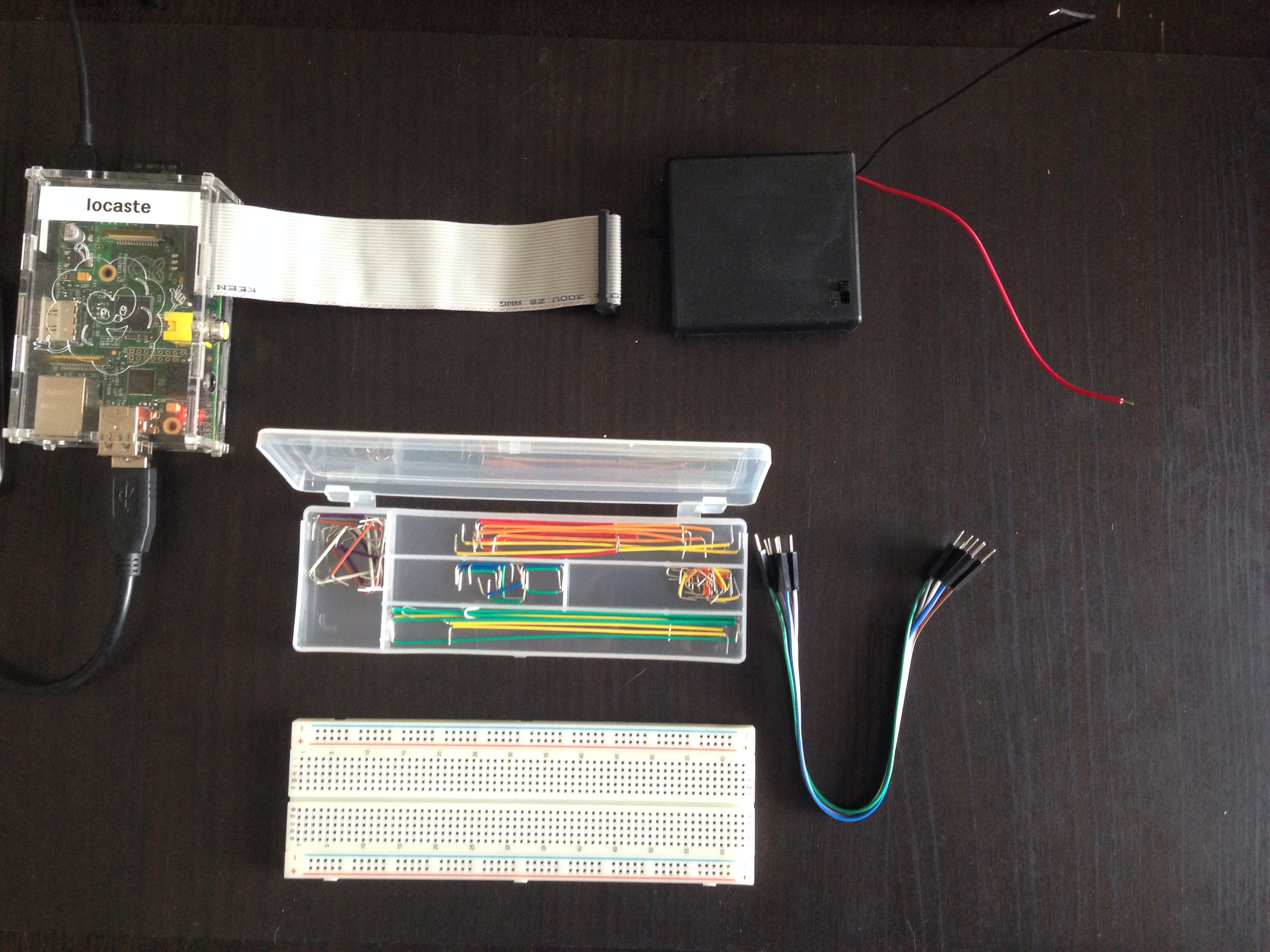
Les piles AA
Vous pouvez utiliser de simples piles AA de 1,5V. Il vous en faudra 4, que vous pouvez placer dans un support à pile comme ce boîtier coupleur 4 piles R6 AA
.

 Les boîtiers équipés d’un interrupteur permettent d’allumer et d’éteindre le Pi facilement. En outre, l’utilisation de piles/accus rechargeables permet de rentabiliser l’achat d’un petit chargeur de piles. Pour mes tests j’utilise 4 accumulateurs (rechargeables) Energizer d’une capacité de 2300mAh fournissant une tension de 1,2V. La tension totale est donc de 4×1,2V soit 4,8V.
Les boîtiers équipés d’un interrupteur permettent d’allumer et d’éteindre le Pi facilement. En outre, l’utilisation de piles/accus rechargeables permet de rentabiliser l’achat d’un petit chargeur de piles. Pour mes tests j’utilise 4 accumulateurs (rechargeables) Energizer d’une capacité de 2300mAh fournissant une tension de 1,2V. La tension totale est donc de 4×1,2V soit 4,8V.
L’inconvénient avec ces piles ou accumulateurs, c’est que la tension chute rapidement en dessous de 4,5V, ce qui devient insuffisant pour faire fonctionner le Pi. Selon l’usage que vous en faites, et les périphériques USB que vous utilisez, vous pouvez tenir entre 2 et 3 heures avec 4 piles/accumulateurs de ce type. Comptez tout de même autour de 20€ pour les 4 piles/accumulateurs et environ 25€ pour un chargeur. Soit prêt de 50€ pour 2 à 3 heures d’autonomie en comptant le boitier coupleur. C’est de loin la solution la plus onéreuse !
Les batteries Lithium-ion ou Lithium-polymère


Il s’agit des batteries vendues comme batteries de secours pour smartphones, tablettes et autres appareils mobiles. L’utilisation du 5V étant un standard pour tous ces périphériques, la plupart de ces batteries conviendront pour votre Pi.
Il faut cependant faire attention à l’intensité maximum que la batterie pourra fournir ; pour la plupart, elles sont capables de délivrer 1A. Le gros avantage de ce type de batterie est que vous pouvez les charger grâce à un câble USB (souvent fournis), ce qui vous évitera d’acheter un chargeur séparément. Autre point fort de ces batteries, elles disposent de prises USB standards, qui permettront l’utilisation d’un câble micro-USB pour les brancher sur le Pi. De quoi faire un montage propre 🙂 Sachez toutefois que ces batteries sont très sensibles aux variations de température. Trop chaud ou trop froid, leur capacité chutera drastiquement. Leur usage en extérieur est donc délicat…
Enfin, ces batteries sont très abordables. On peut trouver des modèles d’une capacité de 5,2 Ah (de quoi tenir environ 6 heures selon l’utilisation) pour moins de 15€ (frais de port compris), comme cette Romoss 5200mAh sur Amazon
. J’ai utilisé cette batterie pour le prototypage du projet Pi CarJukeBox que vous pouvez consultez ici : Proptotype jukebox embarqué

Pour le projet Pi TimeLapse, qui nécessite beaucoup plus d’autonomie, j’ai opté pour le modèle TeckNet PowerBank 9000mAh, qui offre plus de 12 heures de fonctionnement à votre Pi !

Vous trouverez plus de détails sur l’utilisation de cette batterie en lisant cet article : Pi TimeLapse – L’alimentation – 1/2
De plus en plus de modèles sont disponibles, de qualité, capacité et prix très variables. Veillez donc à choisir une batterie dont le rapport capacité/prix est le plus intéressant, tout en prêtant attention à la réputation de la marque et aux avis des autres utilisateurs.
Un mot sur la capacité des batteries : La capacité d’une batterie s’exprime en Ah (ampères heure). Une batterie ayant une capacité de 5Ah pourra, en théorie, fournir 5A pendant 1 heure. Ceci n’est pas à prendre au pied de la lettre. En effet, si la batterie en question ne peut fournir qu’un courant d’ 1A maximum, alors on doit interpréter les 5Ah comme étant la capacité à fournir 1A pendant 5 heures. Il ne s’agit là que d’une approximation grossière, mais qui sert de base de calcul. Dans la pratique, soyez pessimiste quand à la capacité réelle de votre batterie, et prévoyez plus gros que prévu si vous le pouvez. Comme expliqué par Nico en commentaire de cet article, une batterie affichant 5Ah ne fournira que 4Ah en réalité. S’agissant en général de batteries 3,7V couplées à un élévateur de tension pour atteindre 5V, on observe en effet un écart de 20% à 40% entre la valeur théorique et la valeur utile, selon la qualité et le rendement des composants de la batterie.
On trouve depuis peu de très petites batteries Lithium-polymère à des prix presque abordables. Le gros avantage de ce type de batterie est leur poids. C’est un excellent choix pour ceux qui souhaitent réaliser un drone, ou un dispositif très compact. Evidemment, cela se fait au détriment de la capacité et du prix… Même si les batteries Li-po se démocratisent, comptez tout de même 4 fois le prix d’une Li-ion à capacité égale…
Les batteries au plomb
 Les batteries au plomb sont lourdes, très lourdes ! Mais, elles ne sont pas chères, elles se rechargent très facilement (pas besoin d’électronique complexe pour gérer la charge), et vous pouvez en trouver de toutes les capacités ; de quelques centaines de mAh à plus de 150 Ah pour les batteries de camion ! Et surtout, c’est presque increuvable, elles résistent au froid, au chaud, et durent des années sans trop perdre de leur capacité. Si le poids et l’encombrement ne sont pas un problème pour vous, une batterie au plomb peut être un excellent choix !
Les batteries au plomb sont lourdes, très lourdes ! Mais, elles ne sont pas chères, elles se rechargent très facilement (pas besoin d’électronique complexe pour gérer la charge), et vous pouvez en trouver de toutes les capacités ; de quelques centaines de mAh à plus de 150 Ah pour les batteries de camion ! Et surtout, c’est presque increuvable, elles résistent au froid, au chaud, et durent des années sans trop perdre de leur capacité. Si le poids et l’encombrement ne sont pas un problème pour vous, une batterie au plomb peut être un excellent choix !


Pour le projet Pi TimeLapse, j’ai utilisé une batterie plomb rechargeable de 12V avec une capacité de 12 Ah. Je n’ai pas trouvé de batteries plomb en 5V, mais uniquement en 24V, 12V ou 6V. L’utilisation d’un petit convertisseur de tension tel que le KEMO M015N, permet de palier ce problème. Dans ce cas, prenez en compte la consommation du convertisseur de tension ainsi que les pertes occasionnées par la chute de tension.
Ce type de batterie peut notamment être utilisée sur les installations à panneaux solaires, ce qui est très pratique pour les stations météos, systèmes embarqués sur bateaux, en camping, etc…
Note sur les convertisseurs de tension : Pour passer d’une tension de 12V à 5V par exemple, vous devez utiliser un convertisseur ou régulateur de tension. Le KEMO M015N permet d’ajuster la tension de sortie, c’est pratique pour les tests, mais ce n’est pas très précis, sensible à la chaleur, et c’est relativement cher. Si vous connaissez précisemment la tension d’entrée et la tension de sortie dont vous avez besoin, préférez ce type de circuit S7V7F5, ou ce type de module U/SBEC utilisé en modélisme.
Pour les très longues durées
S’il s’agit de faire fonctionner votre Pi pendant quelques heures, une batterie Li-ion entre 5Ah et 9Ah sera parfaite. En revanche, si vous avez besoin que votre système soit fonctionnel plusieurs jours, semaines ou mois, cela devient vite problématique. Vous pouvez tout à fait acheter 200 batteries Li-ion de 10Ah, si vous parvenez à convaincre votre banquier et que vous disposez de plusieurs m3 pour les stocker… Dans le cas contraire il va falloir ruser 😉
Oubliez les panneaux solaires…
 Je suis tout à fait conscient que je risque d’en froisser certains, mais sous nos latitudes les panneaux solaires « portatifs » ne vous permettront pas de faire tourner votre Pi toute l’année…
Je suis tout à fait conscient que je risque d’en froisser certains, mais sous nos latitudes les panneaux solaires « portatifs » ne vous permettront pas de faire tourner votre Pi toute l’année…
Prennons un exemple : En moyenne, les chargeurs solaires portatifs permettent un courant de charge de 250mA, 500mA, voire 1,4A (7W) pour les plus onéreux. Ces valeurs sont bien sûr théoriques, et pour une exposition au soleil idéale… Je n’ai pas pu tester moi même ce type de chargeur solaire, mais d’après les infos que l’on peut trouver sur le web, il est très rare de dépasser les 200mA de charge,… Nous sommes loins des 700mA requis pour faire fonctionner le Pi.
Certains chargeurs solaires ont des batteries Li-ion ou Li-po intégrées de capacités variables. Dans ce cas, le Pi pourra fonctionner sur la batterie qui est elle même rechargée par le panneau solaire. Cependant, le Pi vide la batterie beaucoup plus vite qu’elle ne se recharge. Pire, dans certains cas, il n’est pas possible d’utiliser la batterie en même temps qu’elle se charge…
Bref,… Je suis convaincu que d’ici quelques années nous pourrons exploiter l’énergie solaire de manière plus efficace et que les batteries se chargeront plus vite, mais pour le moment, cette technologie ne permet pas de faire fonctionner un Pi sur la durée.
Note : Bien évidemment, si vous avez plusieurs m² de panneaux solaires sur le toît de votre maison, vous pourrez certainement produire suffisamment d’électricité pour recharger des batteries qui alimenteront le Pi pendant la nuit,… Disons que cela fonctionnera au moins l’été…
Régulez plutôt l’alimentation de votre système !
La question que vous devez vous poser est : « Est-ce que mon système doit fonctionner sans interruption 24h/24 7j/7 ? ». Si la réponse est NON, alors vous pouvez considérablement augmenter l’autonomie de votre système en régulant son alimentation !
Si vous avez construit une station météo, alors vous pouvez récolter les données météorologiques entre 1 et 6 fois par heure ou par jour. Si vous voulez surveillez votre maison de campagne pendant 10 mois dans l’année, vous pouvez vous contenter d’une photo par jour ou même par semaine. Si votre projet est un système automatique pour gérer l’ouverture de votre velux en cas de forte chaleur, vous pouvez vous contenter d’allumer le Pi qu’au délà d’une certaine température…
En réfléchissant bien, il est rare de devoir faire fronctionner votre système non-stop.
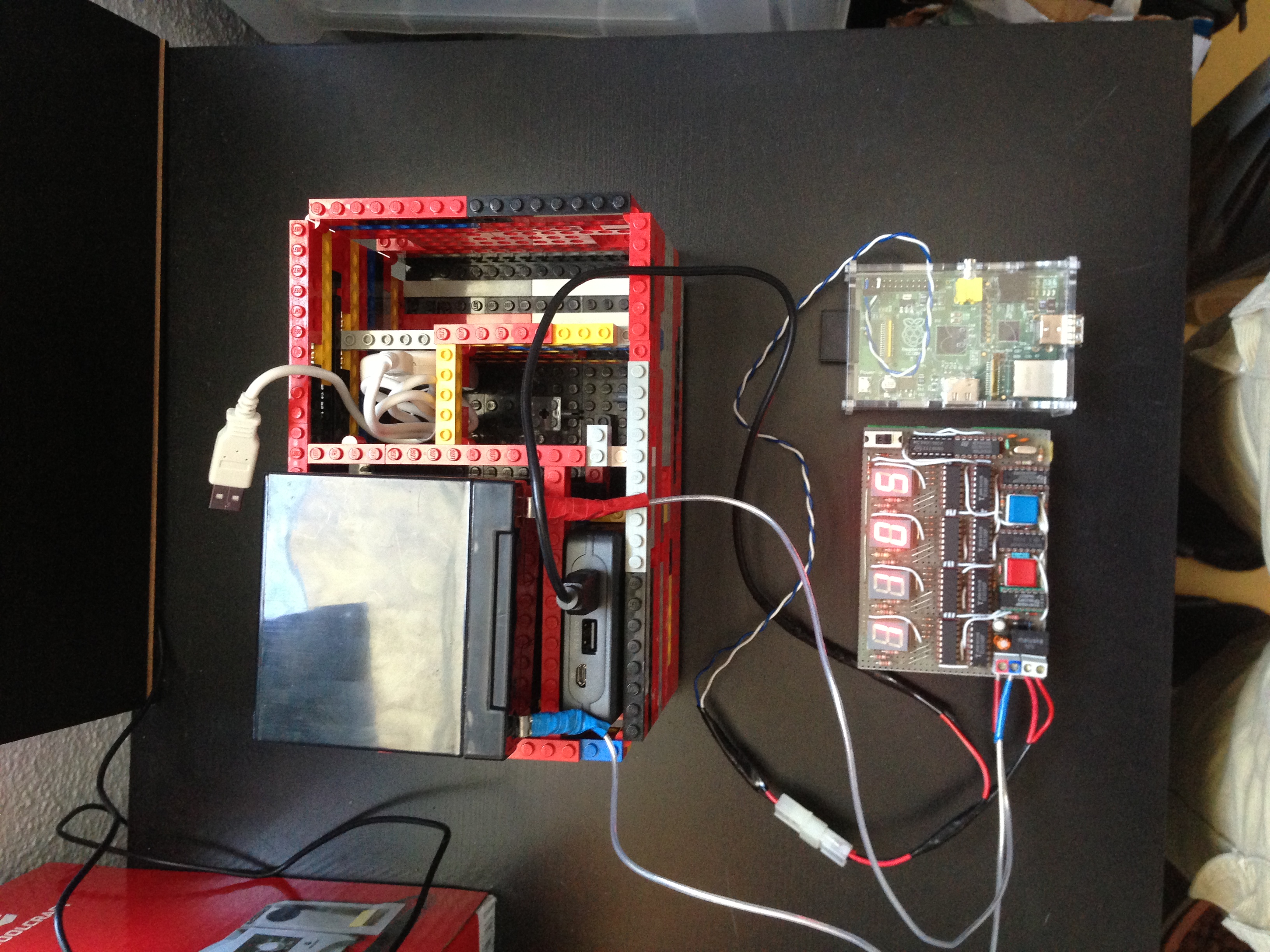
Voici un exemple de montage qui vous permettra de faire fonctionner votre Pi à intervalles réguliers pendant la durée de votre choix. Il s’agit en fait du même type de montage que pour l’Alimentation du Pi dans la voiture 2/3 mais dans une configuration différente.
Le matériel nécessaire
Le montage
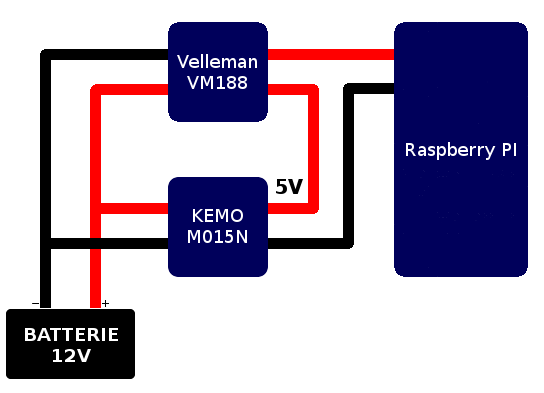 Il vous suffit de régler la minuterie programmable Velleman VM188 selon vos besoins 🙂
Il vous suffit de régler la minuterie programmable Velleman VM188 selon vos besoins 🙂
A savoir : Sous Raspbian, le Pi a besoin d’environ 40 secondes pour booter, et 20 secondes pour s’éteindre correctement (halt). Il faut donc compter 1 minute en plus du temps nécessaire à votre opération. Dans la pratique, 2 minutes de fonctionnement sont un minimum.
En respectant cela, vous pourrez par exemple prendre une photo de votre maison de vacances tous les jours pendant environ 10 mois 🙂 L’ajout d’un petit panneau solaire portatif devient ici pertinent, et permettra d’étendre énormément l’autonomie de votre système, puisque ce dernier ne consommera de la batterie que 2 minutes par jours 🙂
Sélection de batteries et chargeurs pour alimenter votre Pi
On en parle sur ces forums
Solutions alternatives pour alimenter votre Pi

 Voici, selon moi, le stricte minimum du matériel à acheter avant de démarrer :
Voici, selon moi, le stricte minimum du matériel à acheter avant de démarrer : On distingue 7 types de broches et usages qu’on peut en faire :
On distingue 7 types de broches et usages qu’on peut en faire :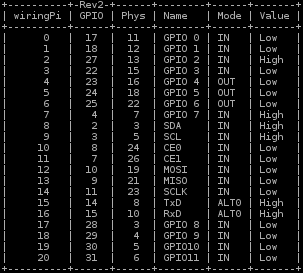 Chaque ligne du tableau représente une broche du port GPIO et vous indique sont mode IN/OUT (entrée/sortie) et sont état/valeur 0/1 (low/high). La colonne GPIO représente le numéro de la broche tel que décrit sur le schéma en haut de cet article. La colonne wiringPi représente le numéro de broche que vous devez utiliser en utilisant la commande gpio.
Chaque ligne du tableau représente une broche du port GPIO et vous indique sont mode IN/OUT (entrée/sortie) et sont état/valeur 0/1 (low/high). La colonne GPIO représente le numéro de la broche tel que décrit sur le schéma en haut de cet article. La colonne wiringPi représente le numéro de broche que vous devez utiliser en utilisant la commande gpio.